 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Memory-Related Multi-Task Method Based on Task-Agnostic Exploration
Paper and Code
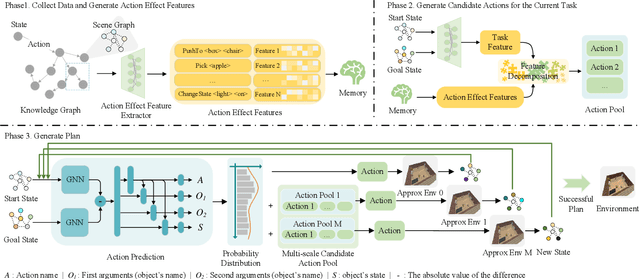
We pose a new question: Can agents learn how to combine actions from previous tasks to complete new tasks, just as humans? In contrast to imitation learning, there is no expert data, only the data collected through environmental exploration. Compared with offline reinforcement learning, the problem of data distribution shift is more serious. Since the action sequence to solve the new task may be the combination of trajectory segments of multiple training tasks, in other words, the test task and the solving strategy do not exist directly in the training data. This makes the problem more difficult. We propose a Memory-related Multi-task Method (M3) to address this problem. The method consists of three stages. First, task-agnostic exploration is carried out to collect data. Different from previous methods, we organize the exploration data into a knowledge graph. We design a model based on the exploration data to extract action effect features and save them in memory, while an action predictive model is trained. Secondly, for a new task, the action effect features stored in memory are used to generate candidate actions by a feature decomposition-based approach. Finally, a multi-scale candidate action pool and the action predictive model are fused to generate a strategy to complete the task. Experimental results show that the performance of our proposed method is significantly improved compared with the baseline.