 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Light Field Camera Calibration Method Using Sub-Aperture Related Bipartition Projection Model and 4D Corner Detection
Paper and Code
Jan 11, 2020

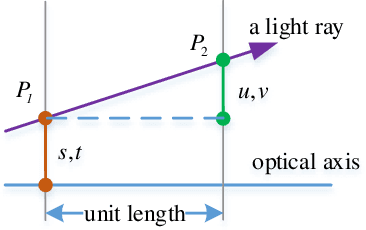
Accurate calibration of intrinsic parameters of the light field (LF) camera is the key issue of many applications, especially of the 3D reconstruction. In this paper, we propose the Sub-Aperture Related Bipartition (SARB) projection model to characterize the LF camera. This projection model is composed with two sets of parameters targeting on center view sub-aperture and relations between sub-apertures. Moreover, we also propose a corner point detection algorithm which fully utilizes the 4D LF information in the raw image. Experimental results have demonstrated the accuracy and robustness of the corner detection method. Both the 2D re-projection errors in the lateral direction and errors in the depth direction are minimized because two sets of parameters in SARB projection model are solved separately.