 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Learning-from-Observation Framework: One-Shot Robot Teaching for Grasp-Manipulation-Release Household Operations
Paper and Code
Aug 24, 2020
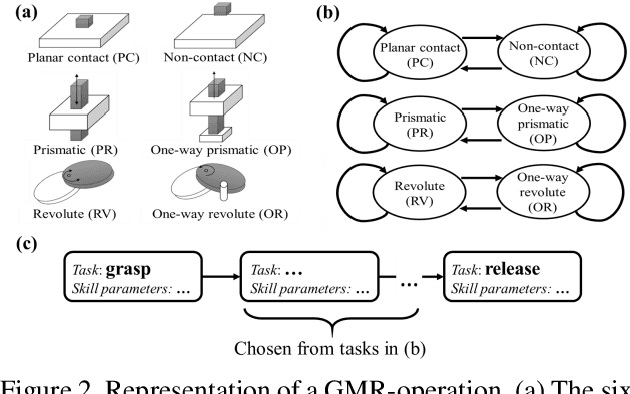
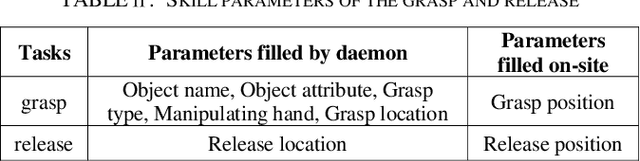

A household robot is expected to perform various manipulative operations with an understanding of the purpose of the task. To this end, robotic applications should provide an on-site robot teaching framework for non-experts. Here, we propose a Learning-from-Observation (LfO) framework for grasp-manipulation-release class household operations (GMR-operations). The framework maps human demonstrations to predefined task models through one-shot teaching. Each task model contains both high-level knowledge regarding the geometric constraints of tasks and low-level knowledge related to human postures. The key goal of this study is to design a task model that 1) covers various GMR-operations and 2) includes human postures to achieve tasks. We verify the applicability of our framework by testing the novel LfO system with a real robot. In addition, we quantify the coverage of the task model by analyzing online videos of household operations. Within the context of one-shot robot teaching, the contribution of this study is a framework that covers various GMR-operations and mimics human postures during operation.