 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Joint Optimization Approach of LiDAR-Camera Fusion for Accurate Dense 3D Reconstructions
Paper and Code
Jul 01, 2019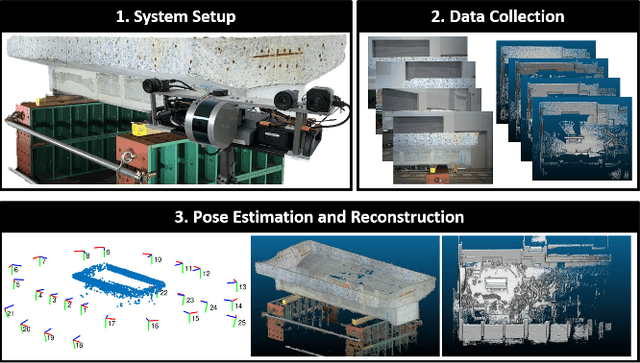
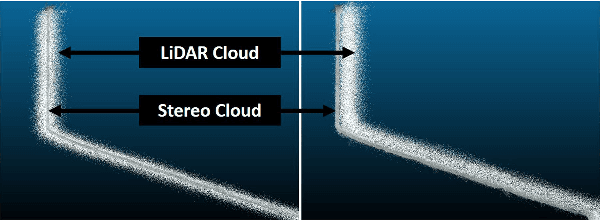
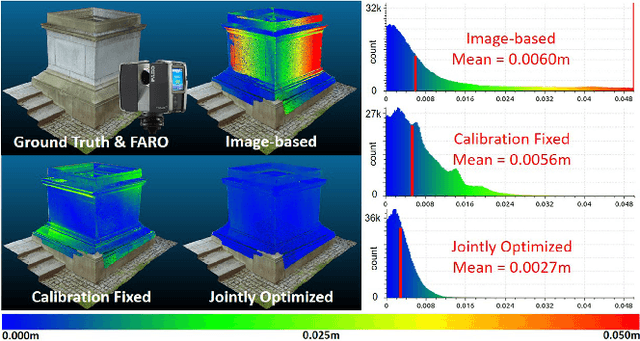
Fusing data from LiDAR and camera is conceptually attractive because of their complementary properties. For instance, camera images are higher resolution and have colors, while LiDAR data provide more accurate range measurements and have a wider Field Of View (FOV). However, the sensor fusion problem remains challenging since it is difficult to find reliable correlations between data of very different characteristics (geometry vs. texture, sparse vs. dense). This paper proposes an offline LiDAR-camera fusion method to build dense, accurate 3D models. Specifically, our method jointly solves a bundle adjustment (BA) problem and a cloud registration problem to compute camera poses and the sensor extrinsic calibration. In experiments, we show that our method can achieve an averaged accuracy of 2.7mm and resolution of 70 points per square cm by comparing to the ground truth data from a survey scanner. Furthermore, the extrinsic calibration result is discussed and shown to outperform the state-of-the-art method.