 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Hybrid Partitioning Strategy for Backward Reachability of Neural Feedback Loops
Paper and Code
Oct 14, 2022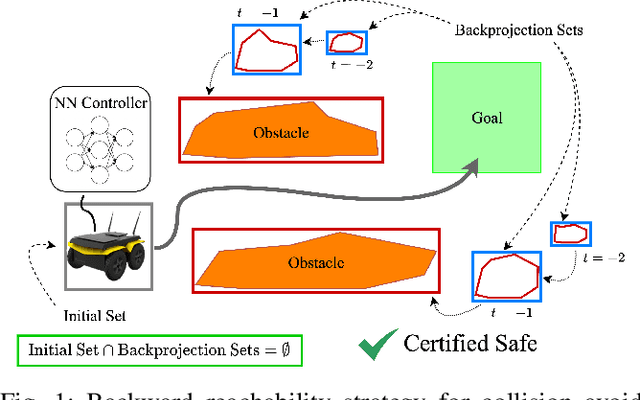
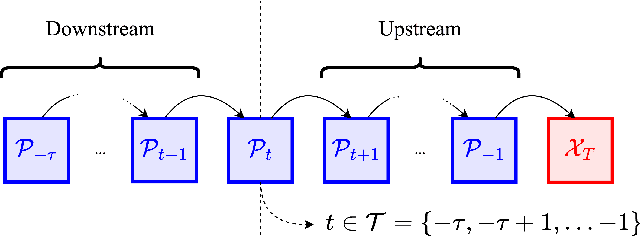
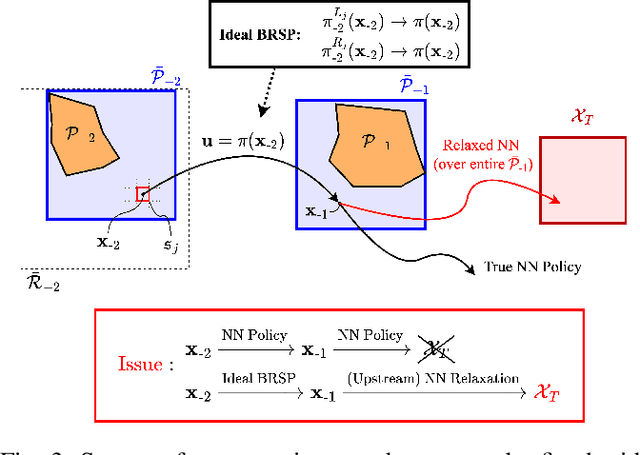
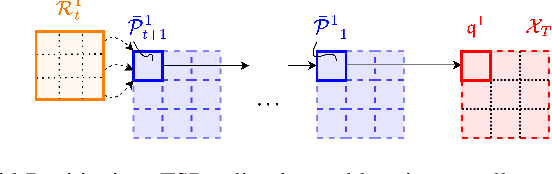
As neural networks become more integrated into the systems that we depend on for transportation, medicine, and security, it becomes increasingly important that we develop methods to analyze their behavior to ensure that they are safe to use within these contexts. The methods used in this paper seek to certify safety for closed-loop systems with neural network controllers, i.e., neural feedback loops, using backward reachability analysis. Namely, we calculate backprojection (BP) set over-approximations (BPOAs), i.e., sets of states that lead to a given target set that bounds dangerous regions of the state space. The system's safety can then be certified by checking its current state against the BPOAs. While over-approximating BPs is significantly faster than calculating exact BP sets, solving the relaxed problem leads to conservativeness. To combat conservativeness, partitioning strategies can be used to split the problem into a set of sub-problems, each less conservative than the unpartitioned problem. We introduce a hybrid partitioning method that uses both target set partitioning (TSP) and backreachable set partitioning (BRSP) to overcome a lower bound on estimation error that is present when using BRSP. Numerical results demonstrate a near order-of-magnitude reduction in estimation error compared to BRSP or TSP given the same computation time.