 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Hierarchical Deep Architecture and Mini-Batch Selection Method For Joint Traffic Sign and Light Detection
Paper and Code
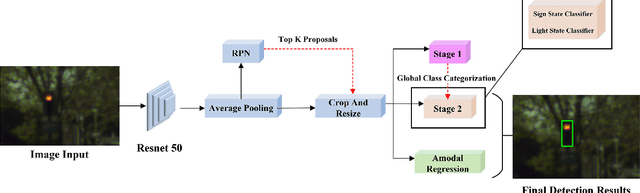
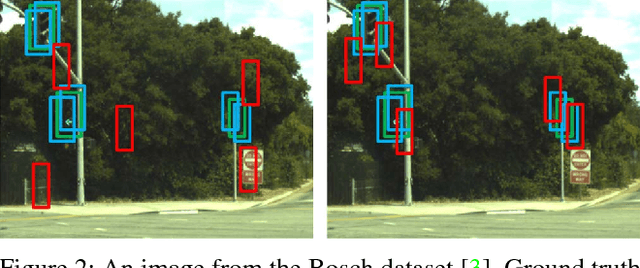

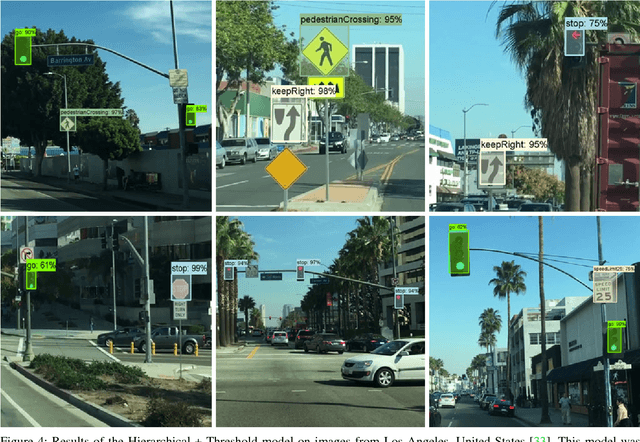
Traffic light and sign detectors on autonomous cars are integral for road scene perception. The literature is abundant with deep learning networks that detect either lights or signs, not both, which makes them unsuitable for real-life deployment due to the limited graphics processing unit (GPU) memory and power available on embedded systems. The root cause of this issue is that no public dataset contains both traffic light and sign labels, which leads to difficulties in developing a joint detection framework. We present a deep hierarchical architecture in conjunction with a mini-batch proposal selection mechanism that allows a network to detect both traffic lights and signs from training on separate traffic light and sign datasets. Our method solves the overlapping issue where instances from one dataset are not labelled in the other dataset. We are the first to present a network that performs joint detection on traffic lights and signs. We measure our network on the Tsinghua-Tencent 100K benchmark for traffic sign detection and the Bosch Small Traffic Lights benchmark for traffic light detection and show it outperforms the existing Bosch Small Traffic light state-of-the-art method. We focus on autonomous car deployment and show our network is more suitable than others because of its low memory footprint and real-time image processing time. Qualitative results can be viewed at https://youtu.be/_YmogPzBXOw