 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Fast Dynamic Point Detection Method for LiDAR-Inertial Odometry in Driving Scenarios
Paper and Code
Jul 04, 2024
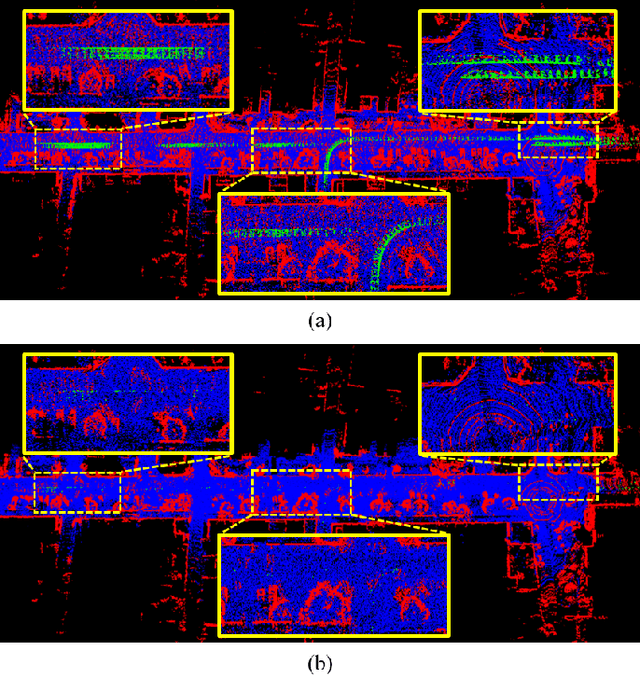


Existing 3D point-based dynamic point detection and removal methods have a significant time overhead, making them difficult to adapt to LiDAR-inertial odometry systems. This paper proposes a label consistency based dynamic point detection and removal method for handling moving vehicles and pedestrians in autonomous driving scenarios, and embeds the proposed dynamic point detection and removal method into a self-designed LiDAR-inertial odometry system. Experimental results on three public datasets demonstrate that our method can accomplish the dynamic point detection and removal with extremely low computational overhead (i.e., 1$\sim$9ms) in LIO systems, meanwhile achieve comparable preservation rate and rejection rate to state-of-the-art methods and significantly enhance the accuracy of pose estimation. We have released the source code of this work for the development of the community.