 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Dual Path ModelWith Adaptive Attention For Vehicle Re-Identification
Paper and Code

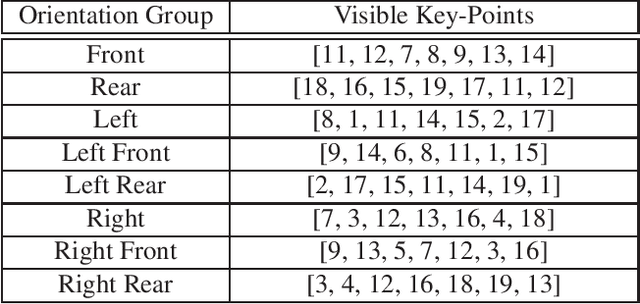
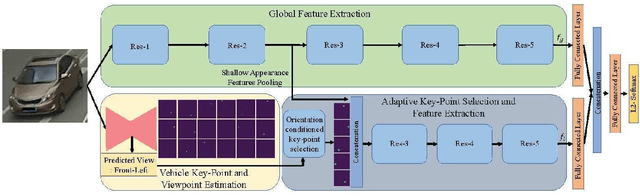

In recent years, attention models have been extensively used for person and vehicle re-identification. Most reidentification methods are designed to focus attention at key-point locations. However, depending on the orientation the contribution of each key-point varies. In this paper, we present a novel dual path adaptive attention model for vehicle re-identification (AAVER). The global appearance path captures macroscopic vehicle features while the orientation conditioned part appearance path learns to capture localized discriminative features by focusing attention to the most informative key-points. Through extensive experimentation, we show that the proposed AAVER method is able to accurately re-identify vehicles in unconstrained scenarios, yielding state of the art results on the challenging dataset VeRi-776. As a byproduct, the proposed system is also able to accurately predict vehicle key-points and shows an improvement of more than 7% over state of the art.