 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Decomposition-Based Approach to Reasoning about Free Space Path-Connectivity for Rigid Objects in 2D
Paper and Code
Oct 27, 2017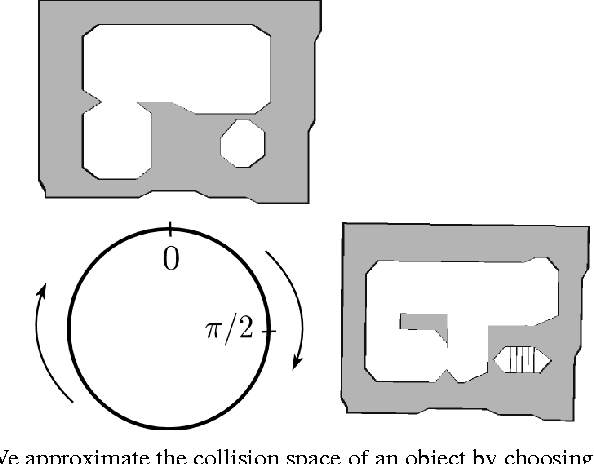



In this paper, we compute a conservative approximation of the path-connected components of the free space of a rigid object in a 2D workspace in order to solve two closely related problems: to determine whether there exists a collision-free path between two given configurations, and to verify whether an object can escape arbitrarily far from its initial configuration -- i.e., whether the object is caged. Furthermore, we consider two quantitative characteristics of the free space: the volume of path-connected components and the width of narrow passages. To address these problems, we decompose the configuration space into a set of two-dimensional slices, approximate them as two-dimensional alpha-complexes, and then study the relations between them. This significantly reduces the computational complexity compared to a direct approximation of the free space. We implement our algorithm and run experiments in a three-dimensional configuration space of a simple object showing runtime of less than 2 seconds.