 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Customizable Dynamic Scenario Modeling and Data Generation Platform for Autonomous Driving
Paper and Code
Nov 30, 2020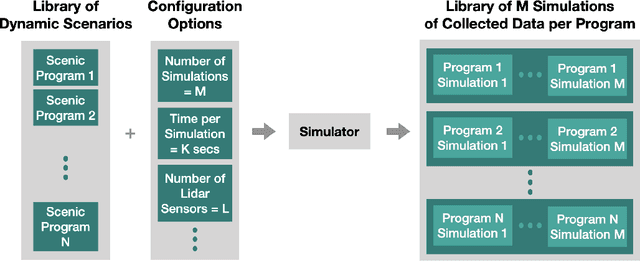
Safely interacting with humans is a significant challenge for autonomous driving. The performance of this interaction depends on machine learning-based modules of an autopilot, such as perception, behavior prediction, and planning. These modules require training datasets with high-quality labels and a diverse range of realistic dynamic behaviors. Consequently, training such modules to handle rare scenarios is difficult because they are, by definition, rarely represented in real-world datasets. Hence, there is a practical need to augment datasets with synthetic data covering these rare scenarios. In this paper, we present a platform to model dynamic and interactive scenarios, generate the scenarios in simulation with different modalities of labeled sensor data, and collect this information for data augmentation. To our knowledge, this is the first integrated platform for these tasks specialized to the autonomous driving domain.