 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Coarse-to-Fine Indoor Layout Estimation Method
Paper and Code
Jul 03, 2016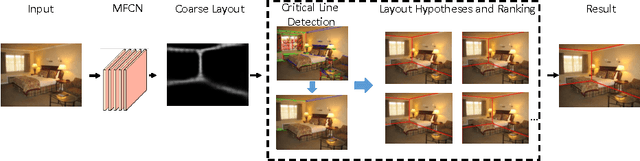

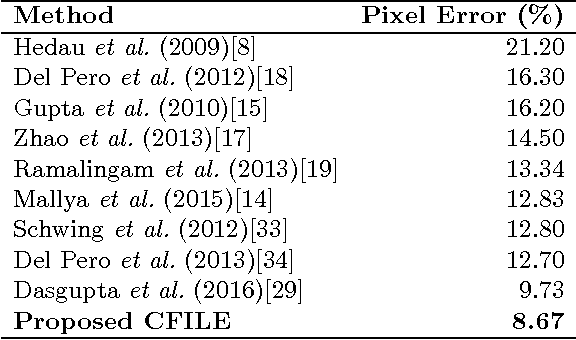
The task of estimating the spatial layout of cluttered indoor scenes from a single RGB image is addressed in this work. Existing solutions to this problems largely rely on hand-craft features and vanishing lines, and they often fail in highly cluttered indoor rooms. The proposed coarse-to-fine indoor layout estimation (CFILE) method consists of two stages: 1) coarse layout estimation; and 2) fine layout localization. In the first stage, we adopt a fully convolutional neural network (FCN) to obtain a coarse-scale room layout estimate that is close to the ground truth globally. The proposed FCN considers combines the layout contour property and the surface property so as to provide a robust estimate in the presence of cluttered objects. In the second stage, we formulate an optimization framework that enforces several constraints such as layout contour straightness, surface smoothness and geometric constraints for layout detail refinement. Our proposed system offers the state-of-the-art performance on two commonly used benchmark datasets.