 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Barrier Pair Method for Safe Human-Robot Shared Autonomy
Paper and Code
Dec 01, 2021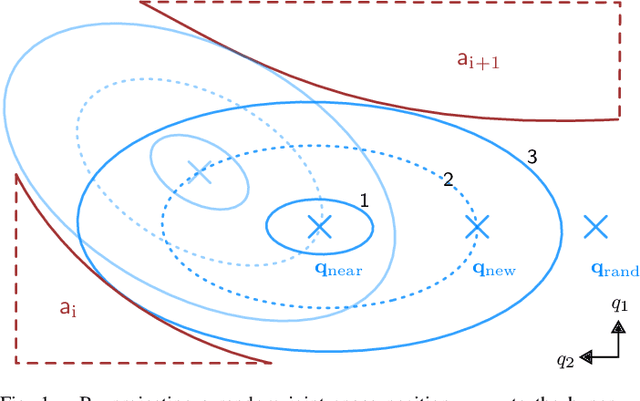
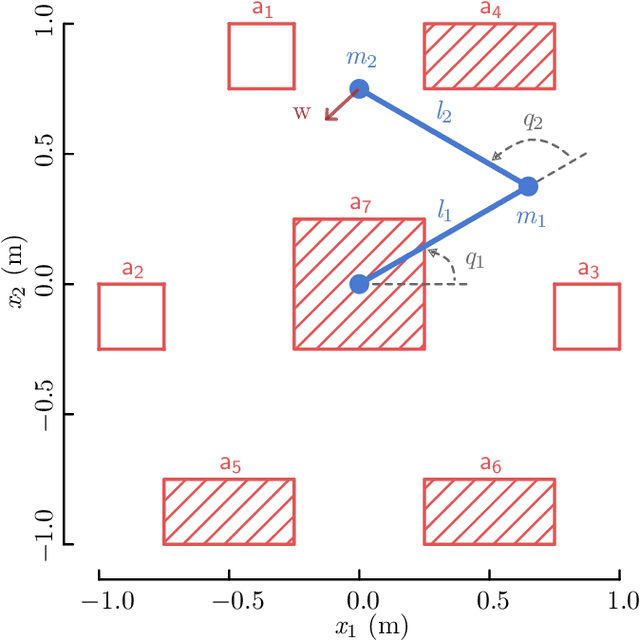
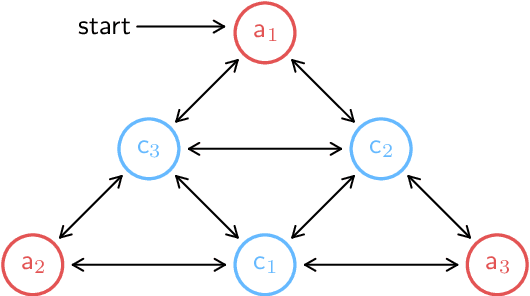
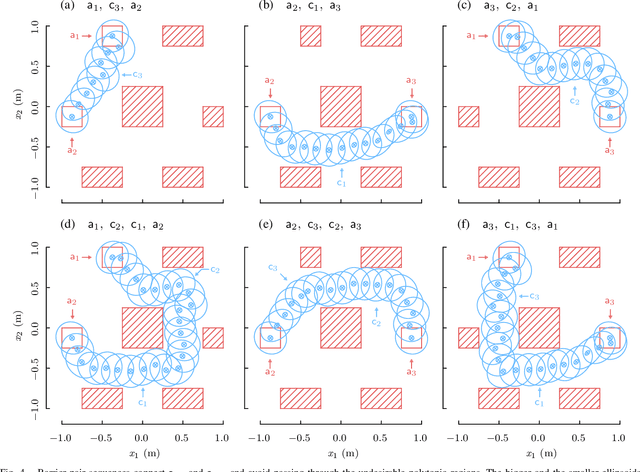
Shared autonomy provides a framework where a human and an automated system, such as a robot, jointly control the system's behavior, enabling an effective solution for various applications, including human-robot interaction. However, a challenging problem in shared autonomy is safety because the human input may be unknown and unpredictable, which affects the robot's safety constraints. If the human input is a force applied through physical contact with the robot, it also alters the robot's behavior to maintain safety. We address the safety issue of shared autonomy in real-time applications by proposing a two-layer control framework. In the first layer, we use the history of human input measurements to infer what the human wants the robot to do and define the robot's safety constraints according to that inference. In the second layer, we formulate a rapidly-exploring random tree of barrier pairs, with each barrier pair composed of a barrier function and a controller. Using the controllers in these barrier pairs, the robot is able to maintain its safe operation under the intervention from the human input. This proposed control framework allows the robot to assist the human while preventing them from encountering safety issues. We demonstrate the proposed control framework on a simulation of a two-linkage manipulator robot.