 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3DIoUMatch: Leveraging IoU Prediction for Semi-Supervised 3D Object Detection
Paper and Code
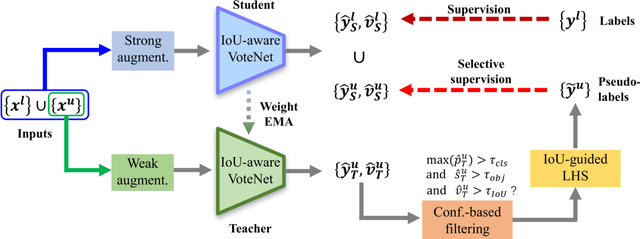
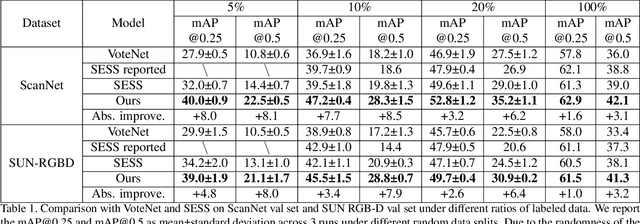

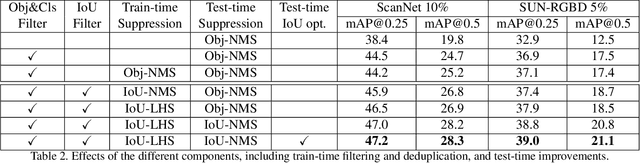
3D object detection is an important yet demanding task that heavily relies on difficult to obtain 3D annotations. To reduce the required amount of supervision, we propose 3DIoUMatch, a novel method for semi-supervised 3D object detection. We adopt VoteNet, a popular point cloud-based object detector, as our backbone and leverage a teacher-student mutual learning framework to propagate information from the labeled to the unlabeled train set in the form of pseudo-labels. However, due to the high task complexity, we observe that the pseudo-labels suffer from significant noise and are thus not directly usable. To that end, we introduce a confidence-based filtering mechanism. The key to our approach is a novel differentiable 3D IoU estimation module. This module is used for filtering poorly localized proposals as well as for IoU-guided bounding box deduplication. At inference time, this module is further utilized to improve localization through test-time optimization. Our method consistently improves state-of-the-art methods on both ScanNet and SUN-RGBD benchmarks by significant margins. For example, when training using only 10\% labeled data on ScanNet, 3DIoUMatch achieves 7.7 absolute improvement on mAP@0.25 and 8.5 absolute improvement on mAP@0.5 upon the prior art.