 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFaultGPT: Industrial Fault Diagnosis Question Answering System by Vision Language Models
Feb 21, 2025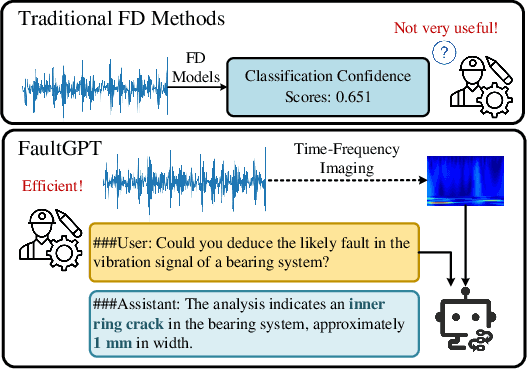
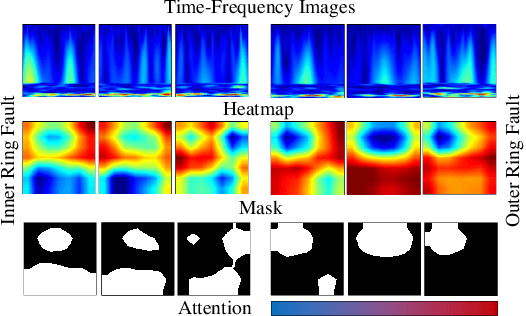
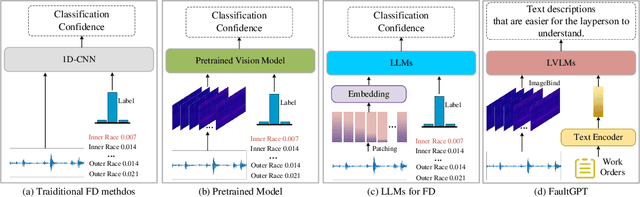
Recently, employing single-modality large language models based on mechanical vibration signals as Tuning Predictors has introduced new perspectives in intelligent fault diagnosis. However, the potential of these methods to leverage multimodal data remains underexploited, particularly in complex mechanical systems where relying on a single data source often fails to capture comprehensive fault information. In this paper, we present FaultGPT, a novel model that generates fault diagnosis reports directly from raw vibration signals. By leveraging large vision-language models (LVLM) and text-based supervision, FaultGPT performs end-to-end fault diagnosis question answering (FDQA), distinguishing itself from traditional classification or regression approaches. Specifically, we construct a large-scale FDQA instruction dataset for instruction tuning of LVLM. This dataset includes vibration time-frequency image-text label pairs and human instruction-ground truth pairs. To enhance the capability in generating high-quality fault diagnosis reports, we design a multi-scale cross-modal image decoder to extract fine-grained fault semantics and conducted instruction tuning without introducing additional training parameters into the LVLM. Extensive experiments, including fault diagnosis report generation, few-shot and zero-shot evaluation across multiple datasets, validate the superior performance and adaptability of FaultGPT in diverse industrial scenarios.
Towards General Industrial Intelligence: A Survey on IIoT-Enhanced Continual Large Models
Sep 02, 2024



Currently, most applications in the Industrial Internet of Things (IIoT) still rely on CNN-based neural networks. Although Transformer-based large models (LMs), including language, vision, and multimodal models, have demonstrated impressive capabilities in AI-generated content (AIGC), their application in industrial domains, such as detection, planning, and control, remains relatively limited. Deploying pre-trained LMs in industrial environments often encounters the challenge of stability and plasticity due to the complexity of tasks, the diversity of data, and the dynamic nature of user demands. To address these challenges, the pre-training and fine-tuning strategy, coupled with continual learning, has proven to be an effective solution, enabling models to adapt to dynamic demands while continuously optimizing their inference and decision-making capabilities. This paper surveys the integration of LMs into IIoT-enhanced General Industrial Intelligence (GII), focusing on two key areas: LMs for GII and LMs on GII. The former focuses on leveraging LMs to provide optimized solutions for industrial application challenges, while the latter investigates continuous optimization of LMs learning and inference capabilities in collaborative scenarios involving industrial devices, edge computing, and cloud computing. This paper provides insights into the future development of GII, aiming to establish a comprehensive theoretical framework and research direction for GII, thereby advancing GII towards a more general and adaptive future.
Edge-Cloud Collaborative Motion Planning for Autonomous Driving with Large Language Models
Aug 19, 2024Integrating large language models (LLMs) into autonomous driving enhances personalization and adaptability in open-world scenarios. However, traditional edge computing models still face significant challenges in processing complex driving data, particularly regarding real-time performance and system efficiency. To address these challenges, this study introduces EC-Drive, a novel edge-cloud collaborative autonomous driving system with data drift detection capabilities. EC-Drive utilizes drift detection algorithms to selectively upload critical data, including new obstacles and traffic pattern changes, to the cloud for processing by GPT-4, while routine data is efficiently managed by smaller LLMs on edge devices. This approach not only reduces inference latency but also improves system efficiency by optimizing communication resource use. Experimental validation confirms the system's robust processing capabilities and practical applicability in real-world driving conditions, demonstrating the effectiveness of this edge-cloud collaboration framework. Our data and system demonstration will be released at https://sites.google.com/view/ec-drive.