 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVoxNeuS: Enhancing Voxel-Based Neural Surface Reconstruction via Gradient Interpolation
Jun 11, 2024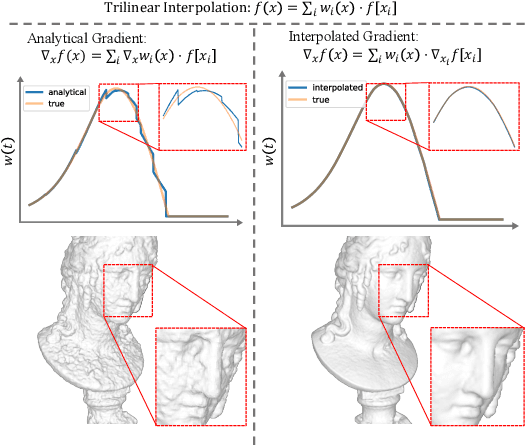
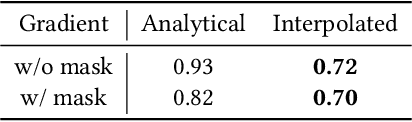
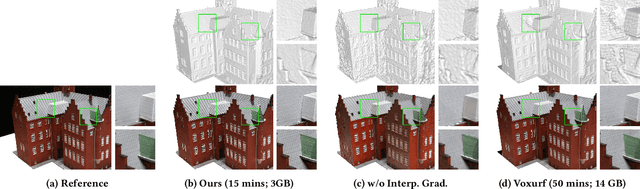
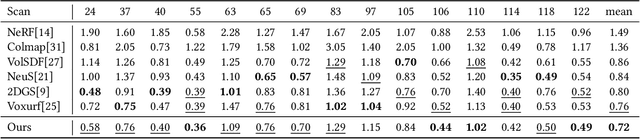
Neural Surface Reconstruction learns a Signed Distance Field~(SDF) to reconstruct the 3D model from multi-view images. Previous works adopt voxel-based explicit representation to improve efficiency. However, they ignored the gradient instability of interpolation in the voxel grid, leading to degradation on convergence and smoothness. Besides, previous works entangled the optimization of geometry and radiance, which leads to the deformation of geometry to explain radiance, causing artifacts when reconstructing textured planes. In this work, we reveal that the instability of gradient comes from its discontinuity during trilinear interpolation, and propose to use the interpolated gradient instead of the original analytical gradient to eliminate the discontinuity. Based on gradient interpolation, we propose VoxNeuS, a lightweight surface reconstruction method for computational and memory efficient neural surface reconstruction. Thanks to the explicit representation, the gradient of regularization terms, i.e. Eikonal and curvature loss, are directly solved, avoiding computation and memory-access overhead. Further, VoxNeuS adopts a geometry-radiance disentangled architecture to handle the geometry deformation from radiance optimization. The experimental results show that VoxNeuS achieves better reconstruction quality than previous works. The entire training process takes 15 minutes and less than 3 GB of memory on a single 2080ti GPU.
DistGrid: Scalable Scene Reconstruction with Distributed Multi-resolution Hash Grid
May 08, 2024



Neural Radiance Field~(NeRF) achieves extremely high quality in object-scaled and indoor scene reconstruction. However, there exist some challenges when reconstructing large-scale scenes. MLP-based NeRFs suffer from limited network capacity, while volume-based NeRFs are heavily memory-consuming when the scene resolution increases. Recent approaches propose to geographically partition the scene and learn each sub-region using an individual NeRF. Such partitioning strategies help volume-based NeRF exceed the single GPU memory limit and scale to larger scenes. However, this approach requires multiple background NeRF to handle out-of-partition rays, which leads to redundancy of learning. Inspired by the fact that the background of current partition is the foreground of adjacent partition, we propose a scalable scene reconstruction method based on joint Multi-resolution Hash Grids, named DistGrid. In this method, the scene is divided into multiple closely-paved yet non-overlapped Axis-Aligned Bounding Boxes, and a novel segmented volume rendering method is proposed to handle cross-boundary rays, thereby eliminating the need for background NeRFs. The experiments demonstrate that our method outperforms existing methods on all evaluated large-scale scenes, and provides visually plausible scene reconstruction. The scalability of our method on reconstruction quality is further evaluated qualitatively and quantitatively.
AbsGS: Recovering Fine Details for 3D Gaussian Splatting
Apr 16, 2024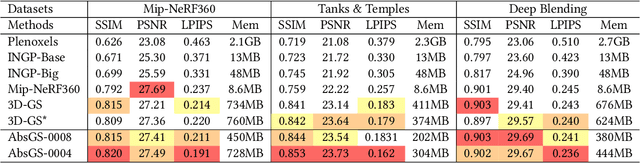
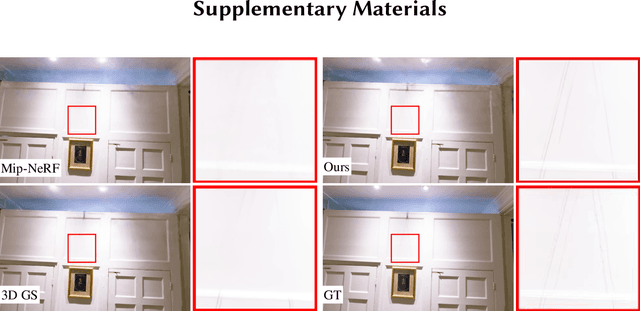
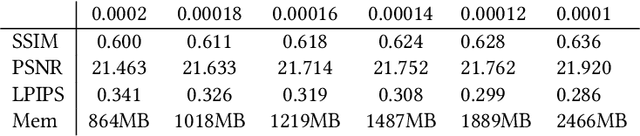
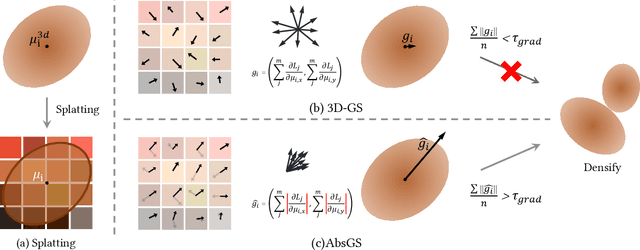
3D Gaussian Splatting (3D-GS) technique couples 3D Gaussian primitives with differentiable rasterization to achieve high-quality novel view synthesis results while providing advanced real-time rendering performance. However, due to the flaw of its adaptive density control strategy in 3D-GS, it frequently suffers from over-reconstruction issue in intricate scenes containing high-frequency details, leading to blurry rendered images. The underlying reason for the flaw has still been under-explored. In this work, we present a comprehensive analysis of the cause of aforementioned artifacts, namely gradient collision, which prevents large Gaussians in over-reconstructed regions from splitting. To address this issue, we propose the novel homodirectional view-space positional gradient as the criterion for densification. Our strategy efficiently identifies large Gaussians in over-reconstructed regions, and recovers fine details by splitting. We evaluate our proposed method on various challenging datasets. The experimental results indicate that our approach achieves the best rendering quality with reduced or similar memory consumption. Our method is easy to implement and can be incorporated into a wide variety of most recent Gaussian Splatting-based methods. We will open source our codes upon formal publication. Our project page is available at: https://ty424.github.io/AbsGS.github.io/