 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhole-body Motion Control of an Omnidirectional Wheel-Legged Mobile Manipulator via Contact-Aware Dynamic Optimization
Sep 17, 2025Wheel-legged robots with integrated manipulators hold great promise for mobile manipulation in logistics, industrial automation, and human-robot collaboration. However, unified control of such systems remains challenging due to the redundancy in degrees of freedom, complex wheel-ground contact dynamics, and the need for seamless coordination between locomotion and manipulation. In this work, we present the design and whole-body motion control of an omnidirectional wheel-legged quadrupedal robot equipped with a dexterous manipulator. The proposed platform incorporates independently actuated steering modules and hub-driven wheels, enabling agile omnidirectional locomotion with high maneuverability in structured environments. To address the challenges of contact-rich interaction, we develop a contact-aware whole-body dynamic optimization framework that integrates point-contact modeling for manipulation with line-contact modeling for wheel-ground interactions. A warm-start strategy is introduced to accelerate online optimization, ensuring real-time feasibility for high-dimensional control. Furthermore, a unified kinematic model tailored for the robot's 4WIS-4WID actuation scheme eliminates the need for mode switching across different locomotion strategies, improving control consistency and robustness. Simulation and experimental results validate the effectiveness of the proposed framework, demonstrating agile terrain traversal, high-speed omnidirectional mobility, and precise manipulation under diverse scenarios, underscoring the system's potential for factory automation, urban logistics, and service robotics in semi-structured environments.
Optimal Multilayered Motion Planning for Multiple Differential Drive Mobile Robots with Hierarchical Prioritization (OM-MP)
May 11, 2024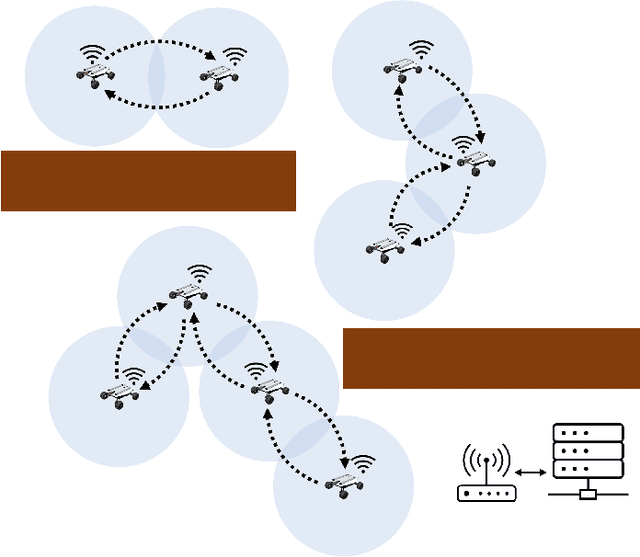
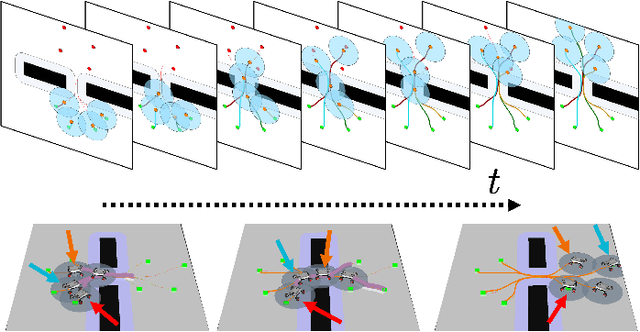
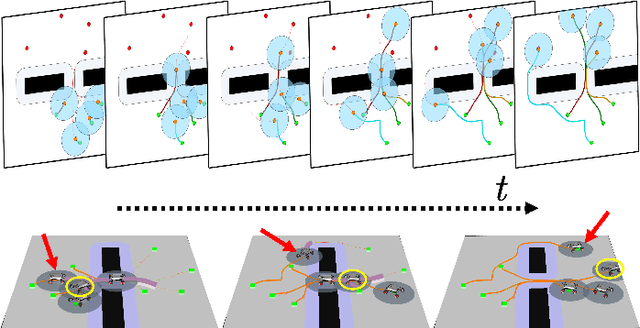
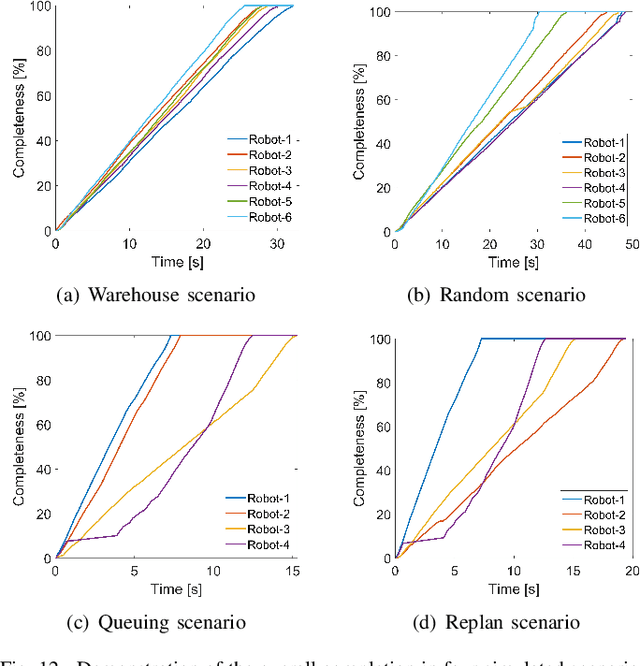
We present a novel framework for addressing the challenges of multi-Agent planning and formation control within intricate and dynamic environments. This framework transforms the Multi-Agent Path Finding (MAPF) problem into a Multi-Agent Trajectory Planning (MATP) problem. Unlike traditional MAPF solutions, our multilayer optimization scheme consists of a global planner optimization solver, which is dedicated to determining concise global paths for each individual robot, and a local planner with an embedded optimization solver aimed at ensuring the feasibility of local robot trajectories. By implementing a hierarchical prioritization strategy, we enhance robots' efficiency and approximate the global optimal solution. Specifically, within the global planner, we employ the Augmented Graph Search (AGS) algorithm, which significantly improves the speed of solutions. Meanwhile, within the local planner optimization solver, we utilize Control Barrier functions (CBFs) and introduced an oblique cylindrical obstacle bounding box based on the time axis for obstacle avoidance and construct a single-robot locally aware-communication circle to ensure the simplicity, speed, and accuracy of locally optimized solutions. Additionally, we integrate the weight and priority of path traces to prevent deadlocks in limiting scenarios. Compared to the other state-of-the-art methods, including CBS, ECBS and other derivative algorithms, our proposed method demonstrates superior performance in terms of capacity, flexible scalability and overall task optimality in theory, as validated through simulations and experiments.
FDSPC: Fast and Direct Smooth Path Planning via Continuous Curvature Integration
May 06, 2024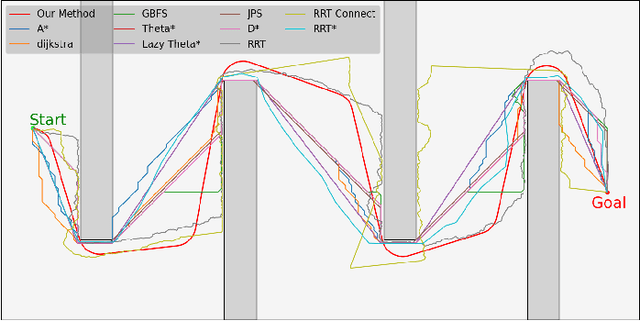
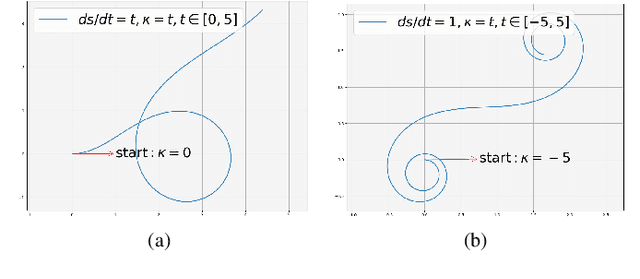
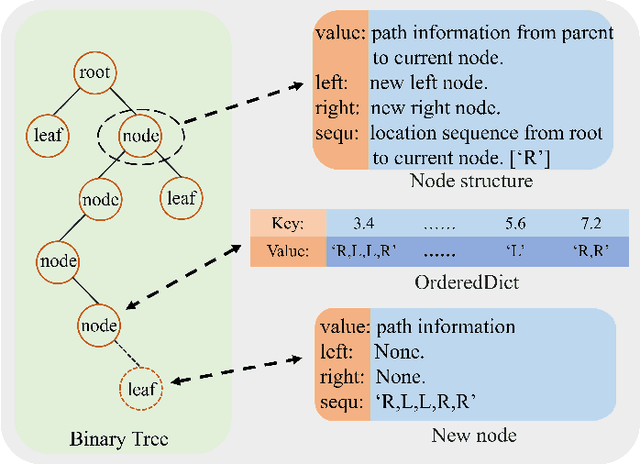
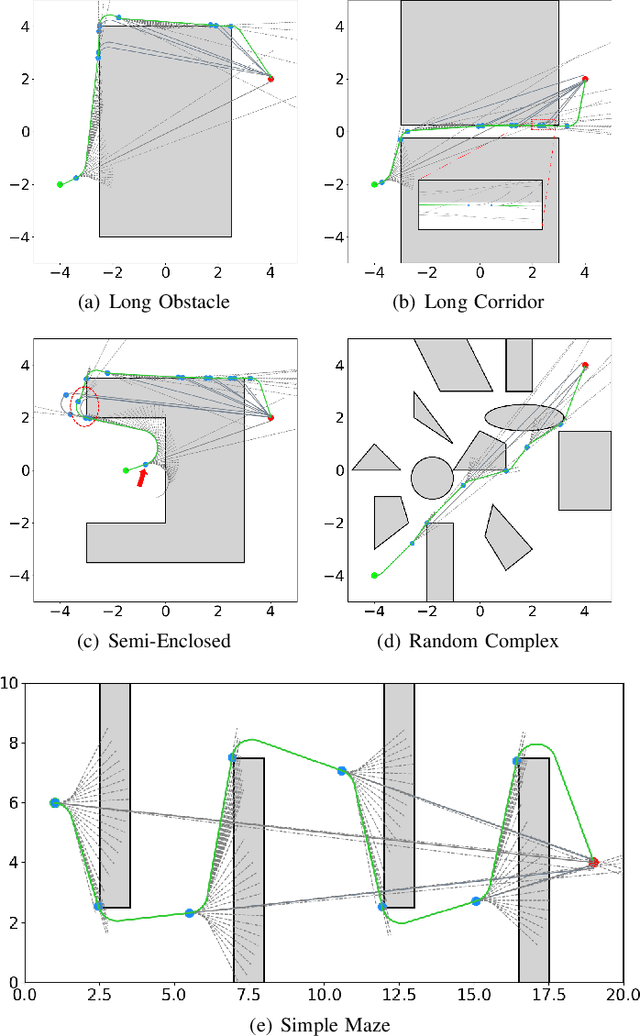
In recent decades, global path planning of robot has seen significant advancements. Both heuristic search-based methods and probability sampling-based methods have shown capabilities to find feasible solutions in complex scenarios. However, mainstream global path planning algorithms often produce paths with bends, requiring additional smoothing post-processing. In this work, we propose a fast and direct path planning method based on continuous curvature integration. This method ensures path feasibility while directly generating global smooth paths with constant velocity, thus eliminating the need for post-path-smoothing. Furthermore, we compare the proposed method with existing approaches in terms of solution time, path length, memory usage, and smoothness under multiple scenarios. The proposed method is vastly superior to the average performance of state-of-the-art (SOTA) methods, especially in terms of the self-defined $\mathcal{S}_2 $ smoothness (mean angle of steering). These results demonstrate the effectiveness and superiority of our approach in several representative environments.
Stability control for USVs with SINDY-based online dynamic model update
Nov 29, 2023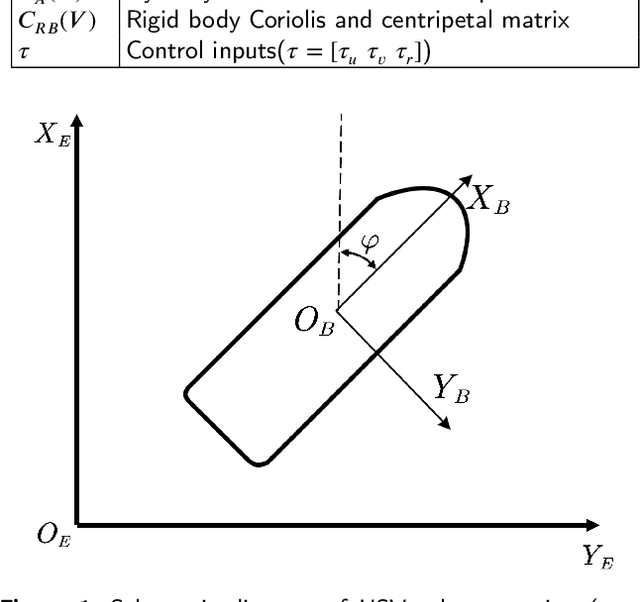
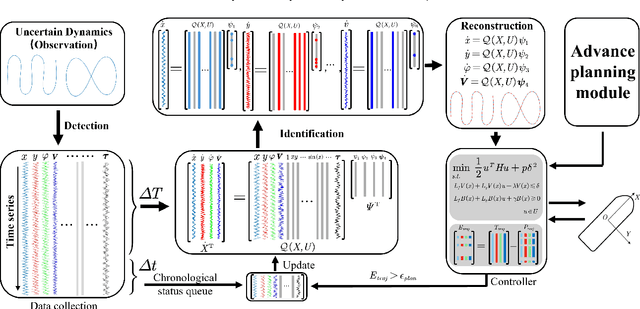
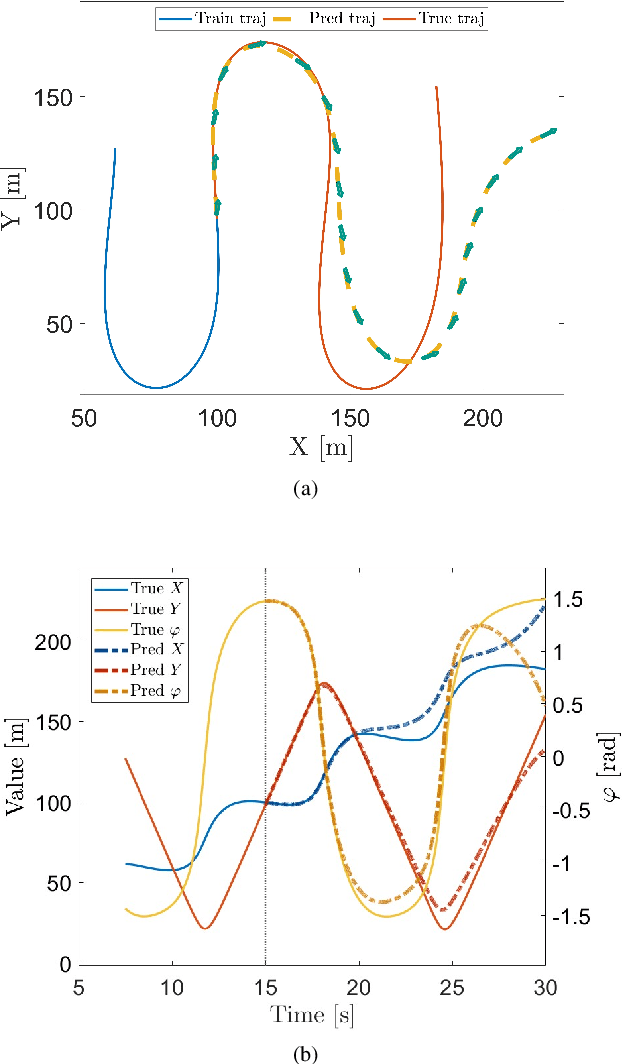
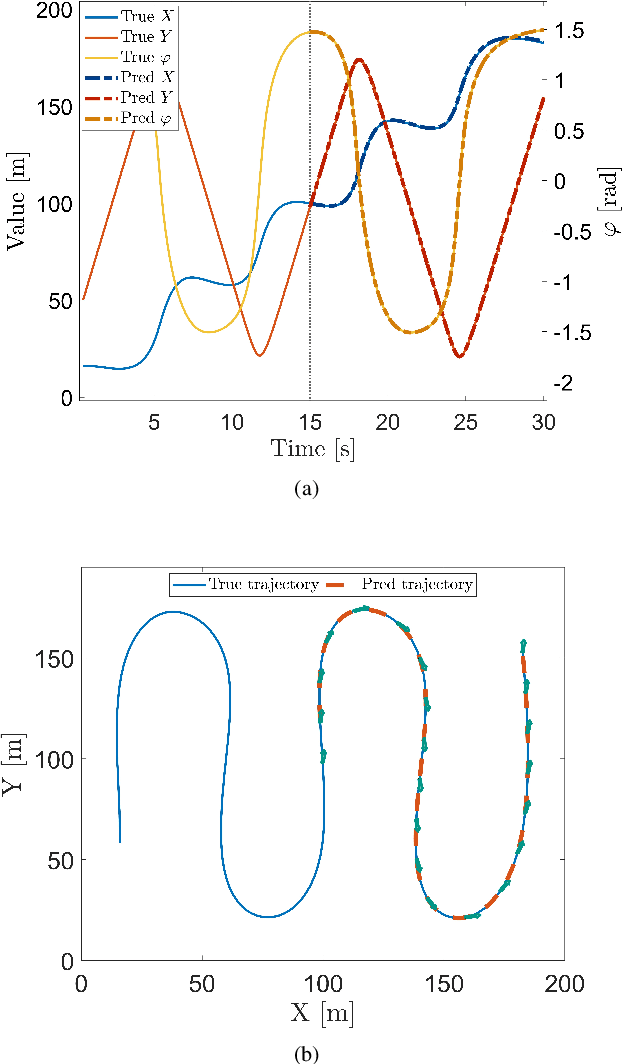
Unmanned Surface Vehicles (USVs) play a pivotal role in various applications, including surface rescue, commercial transactions, scientific exploration, water rescue, and military operations. The effective control of high-speed unmanned surface boats stands as a critical aspect within the overall USV system, particularly in challenging environments marked by complex surface obstacles and dynamic conditions, such as time-varying surges, non-directional forces, and unpredictable winds. In this paper, we propose a data-driven control method based on Koopman theory. This involves constructing a high-dimensional linear model by mapping a low-dimensional nonlinear model to a higher-dimensional linear space through data identification. The observable USVs dynamical system is dynamically reconstructed using online error learning. To enhance tracking control accuracy, we utilize a Constructive Lyapunov Function (CLF)-Control Barrier Function (CBF)-Quadratic Programming (QP) approach to regulate the high-dimensional linear dynamical system obtained through identification. This approach facilitates error compensation, thereby achieving more precise tracking control.
Fast Safe Rectangular Corridor-based Online AGV Trajectory Optimization with Obstacle Avoidance
Sep 14, 2023



Automated Guided Vehicles (AGVs) are widely adopted in various industries due to their efficiency and adaptability. However, safely deploying AGVs in dynamic environments remains a significant challenge. This paper introduces an online trajectory optimization framework, the Fast Safe Rectangular Corridor (FSRC), designed for AGVs in obstacle-rich settings. The primary challenge is efficiently planning trajectories that prioritize safety and collision avoidance. To tackle this challenge, the FSRC algorithm constructs convex regions, represented as rectangular corridors, to address obstacle avoidance constraints within an optimal control problem. This conversion from non-convex to box constraints improves the collision avoidance efficiency and quality. Additionally, the Modified Visibility Graph algorithm speeds up path planning, and a boundary discretization strategy expedites FSRC construction. The framework also includes a dynamic obstacle avoidance strategy for real-time adaptability. Our framework's effectiveness and superiority have been demonstrated in experiments, particularly in computational efficiency (see Fig. \ref{fig:case1} and \ref{fig:case23}). Compared to state-of-the-art frameworks, our trajectory planning framework significantly enhances computational efficiency, ranging from 1 to 2 orders of magnitude (see Table \ref{tab:res}). Notably, the FSRC algorithm outperforms other safe convex corridor-based methods, substantially improving computational efficiency by 1 to 2 orders of magnitude (see Table \ref{tab:FRSC}).