 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStability control for USVs with SINDY-based online dynamic model update
Paper and Code
Nov 29, 2023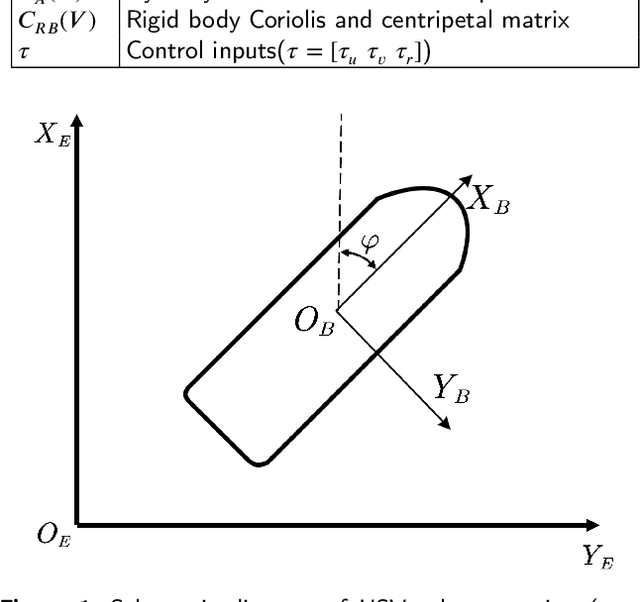
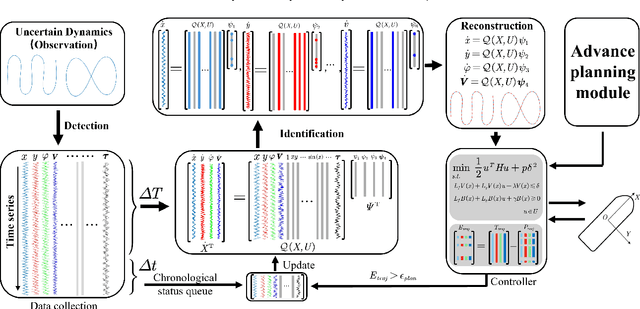
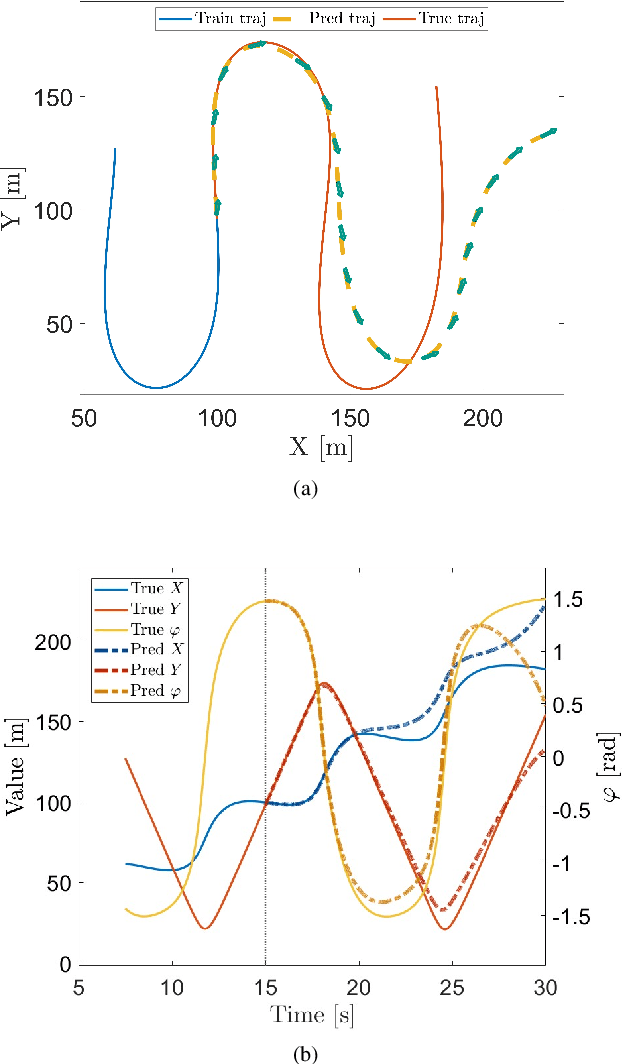
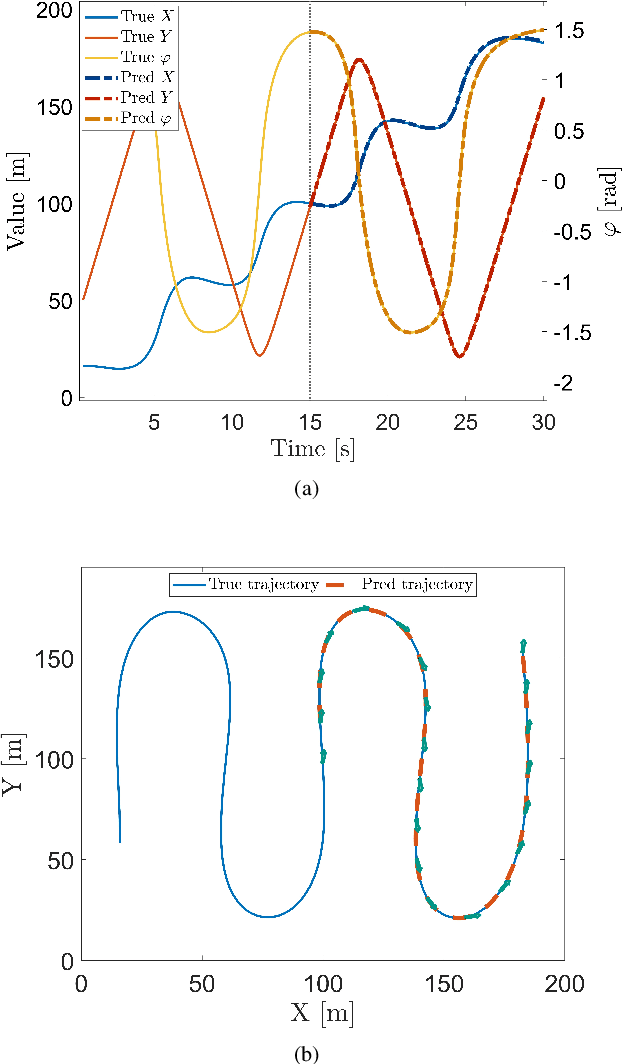
Unmanned Surface Vehicles (USVs) play a pivotal role in various applications, including surface rescue, commercial transactions, scientific exploration, water rescue, and military operations. The effective control of high-speed unmanned surface boats stands as a critical aspect within the overall USV system, particularly in challenging environments marked by complex surface obstacles and dynamic conditions, such as time-varying surges, non-directional forces, and unpredictable winds. In this paper, we propose a data-driven control method based on Koopman theory. This involves constructing a high-dimensional linear model by mapping a low-dimensional nonlinear model to a higher-dimensional linear space through data identification. The observable USVs dynamical system is dynamically reconstructed using online error learning. To enhance tracking control accuracy, we utilize a Constructive Lyapunov Function (CLF)-Control Barrier Function (CBF)-Quadratic Programming (QP) approach to regulate the high-dimensional linear dynamical system obtained through identification. This approach facilitates error compensation, thereby achieving more precise tracking control.