 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Decision Making for UAV Cooperative Pursuit-Evasion Game with Reinforcement Learning
Nov 05, 2024

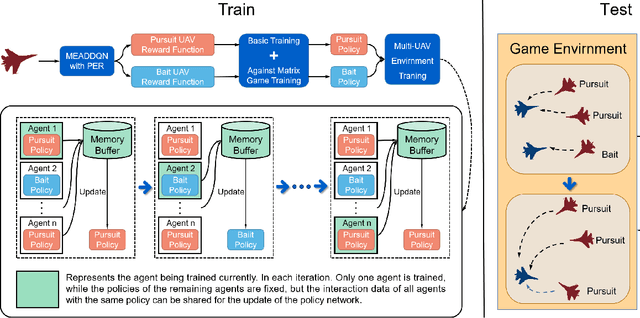
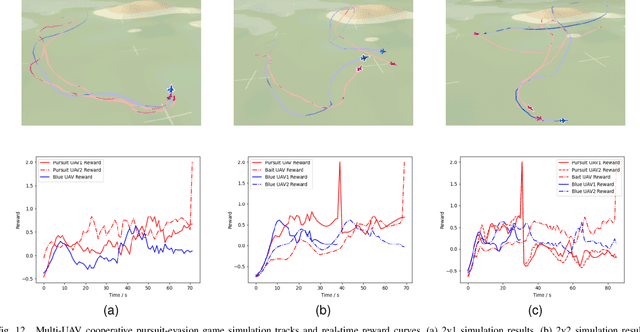
The application of intelligent decision-making in unmanned aerial vehicle (UAV) is increasing, and with the development of UAV 1v1 pursuit-evasion game, multi-UAV cooperative game has emerged as a new challenge. This paper proposes a deep reinforcement learning-based model for decision-making in multi-role UAV cooperative pursuit-evasion game, to address the challenge of enabling UAV to autonomously make decisions in complex game environments. In order to enhance the training efficiency of the reinforcement learning algorithm in UAV pursuit-evasion game environment that has high-dimensional state-action space, this paper proposes multi-environment asynchronous double deep Q-network with priority experience replay algorithm to effectively train the UAV's game policy. Furthermore, aiming to improve cooperation ability and task completion efficiency, as well as minimize the cost of UAVs in the pursuit-evasion game, this paper focuses on the allocation of roles and targets within multi-UAV environment. The cooperative game decision model with varying numbers of UAVs are obtained by assigning diverse tasks and roles to the UAVs in different scenarios. The simulation results demonstrate that the proposed method enables autonomous decision-making of the UAVs in pursuit-evasion game scenarios and exhibits significant capabilities in cooperation.