 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeREGTR: End-to-end Point Cloud Correspondences with Transformers
Mar 28, 2022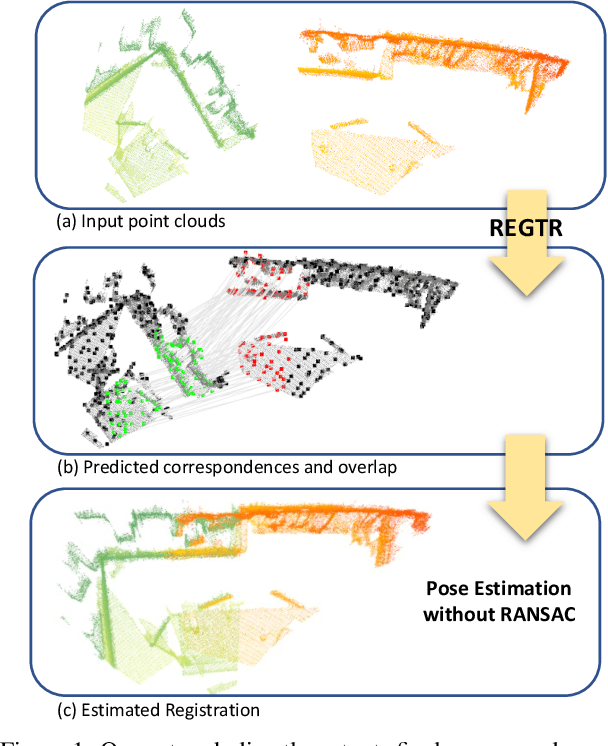

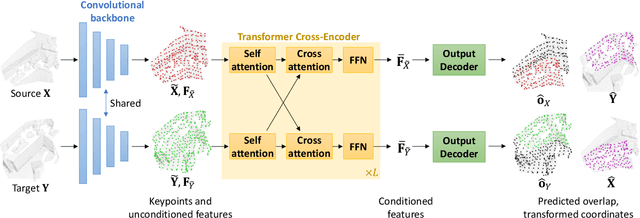
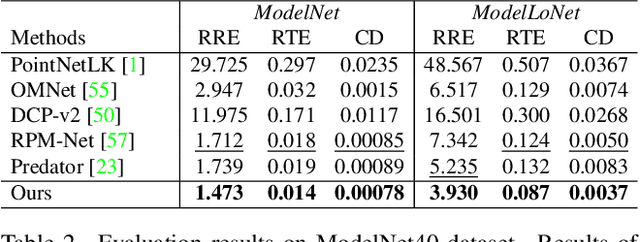
Despite recent success in incorporating learning into point cloud registration, many works focus on learning feature descriptors and continue to rely on nearest-neighbor feature matching and outlier filtering through RANSAC to obtain the final set of correspondences for pose estimation. In this work, we conjecture that attention mechanisms can replace the role of explicit feature matching and RANSAC, and thus propose an end-to-end framework to directly predict the final set of correspondences. We use a network architecture consisting primarily of transformer layers containing self and cross attentions, and train it to predict the probability each point lies in the overlapping region and its corresponding position in the other point cloud. The required rigid transformation can then be estimated directly from the predicted correspondences without further post-processing. Despite its simplicity, our approach achieves state-of-the-art performance on 3DMatch and ModelNet benchmarks. Our source code can be found at https://github.com/yewzijian/RegTR .
Learning Iterative Robust Transformation Synchronization
Nov 01, 2021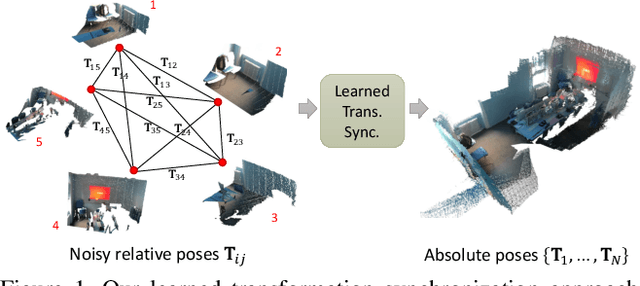

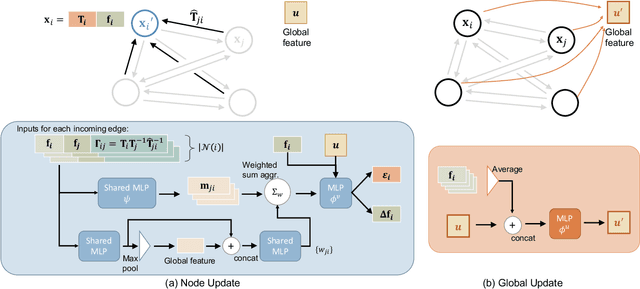
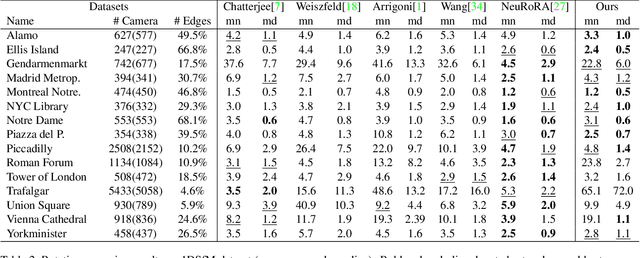
Transformation Synchronization is the problem of recovering absolute transformations from a given set of pairwise relative motions. Despite its usefulness, the problem remains challenging due to the influences from noisy and outlier relative motions, and the difficulty to model analytically and suppress them with high fidelity. In this work, we avoid handcrafting robust loss functions, and propose to use graph neural networks (GNNs) to learn transformation synchronization. Unlike previous works which use complicated multi-stage pipelines, we use an iterative approach where each step consists of a single weight-shared message passing layer that refines the absolute poses from the previous iteration by predicting an incremental update in the tangent space. To reduce the influence of outliers, the messages are weighted before aggregation. Our iterative approach alleviates the need for an explicit initialization step and performs well with identity initial poses. Although our approach is simple, we show that it performs favorably against existing handcrafted and learned synchronization methods through experiments on both SO(3) and SE(3) synchronization.
City-scale Scene Change Detection using Point Clouds
Mar 26, 2021

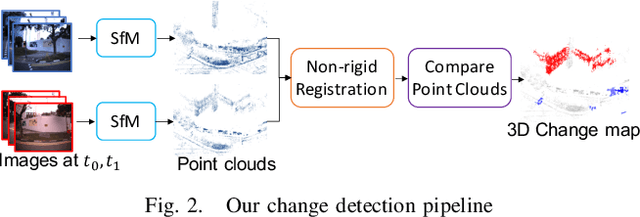
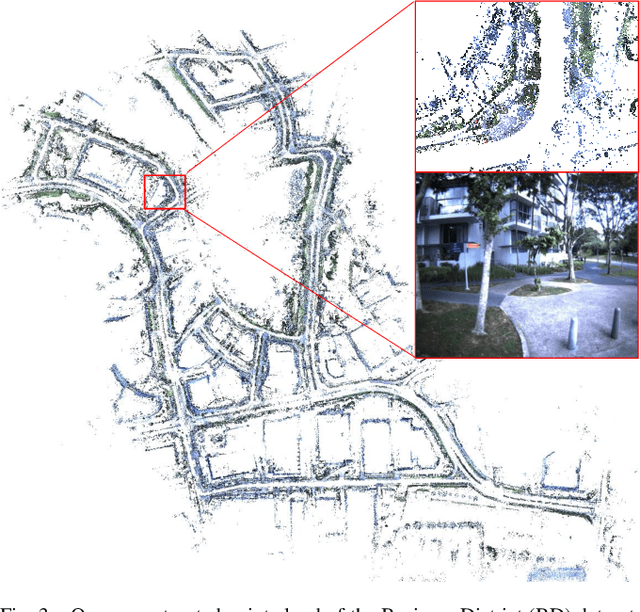
We propose a method for detecting structural changes in a city using images captured from vehicular mounted cameras over traversals at two different times. We first generate 3D point clouds for each traversal from the images and approximate GNSS/INS readings using Structure-from-Motion (SfM). A direct comparison of the two point clouds for change detection is not ideal due to inaccurate geo-location information and possible drifts in the SfM. To circumvent this problem, we propose a deep learning-based non-rigid registration on the point clouds which allows us to compare the point clouds for structural change detection in the scene. Furthermore, we introduce a dual thresholding check and post-processing step to enhance the robustness of our method. We collect two datasets for the evaluation of our approach. Experiments show that our method is able to detect scene changes effectively, even in the presence of viewpoint and illumination differences.
RPM-Net: Robust Point Matching using Learned Features
Mar 30, 2020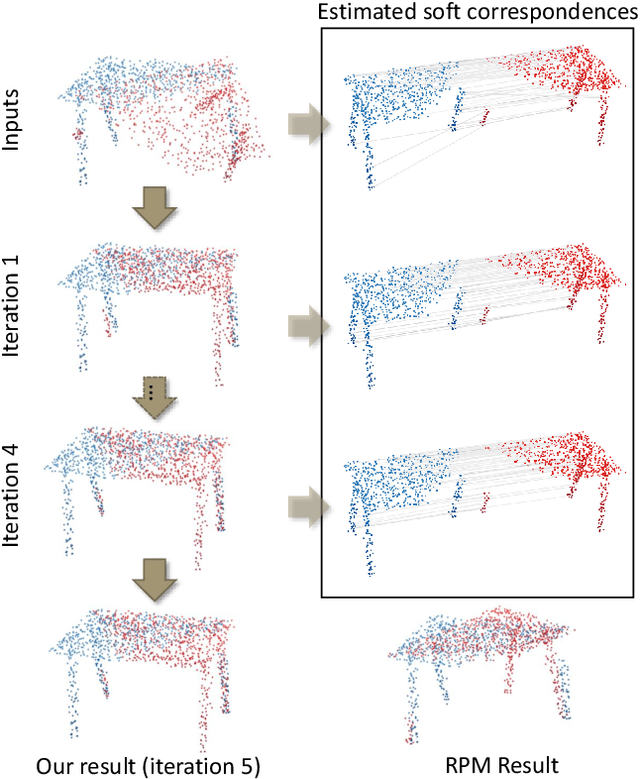
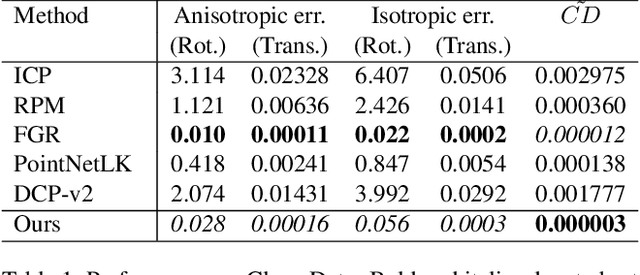
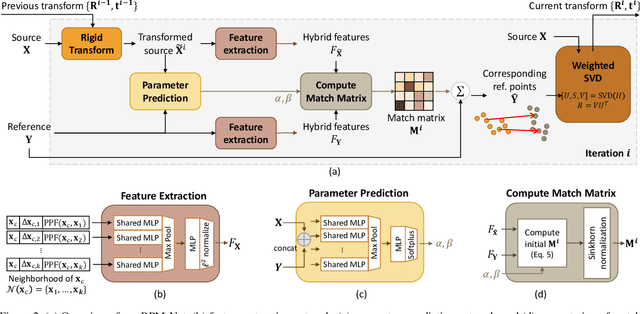
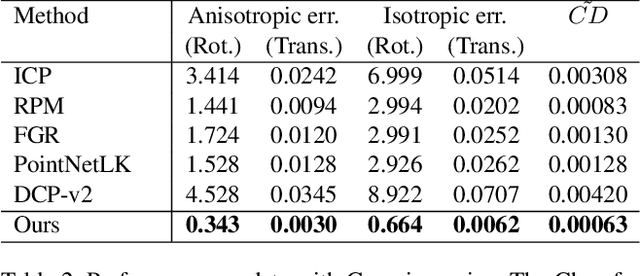
Iterative Closest Point (ICP) solves the rigid point cloud registration problem iteratively in two steps: (1) make hard assignments of spatially closest point correspondences, and then (2) find the least-squares rigid transformation. The hard assignments of closest point correspondences based on spatial distances are sensitive to the initial rigid transformation and noisy/outlier points, which often cause ICP to converge to wrong local minima. In this paper, we propose the RPM-Net -- a less sensitive to initialization and more robust deep learning-based approach for rigid point cloud registration. To this end, our network uses the differentiable Sinkhorn layer and annealing to get soft assignments of point correspondences from hybrid features learned from both spatial coordinates and local geometry. To further improve registration performance, we introduce a secondary network to predict optimal annealing parameters. Unlike some existing methods, our RPM-Net handles missing correspondences and point clouds with partial visibility. Experimental results show that our RPM-Net achieves state-of-the-art performance compared to existing non-deep learning and recent deep learning methods. Our source code is available at the project website https://github.com/yewzijian/RPMNet .
Robust Point Cloud Based Reconstruction of Large-Scale Outdoor Scenes
May 23, 2019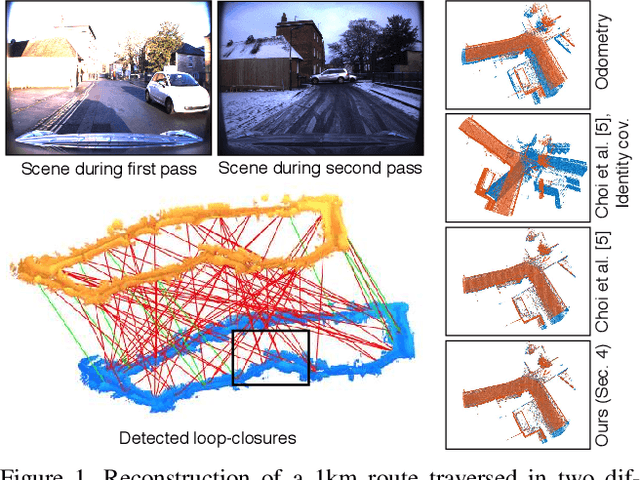
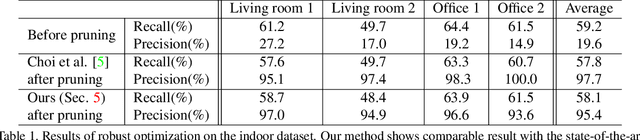
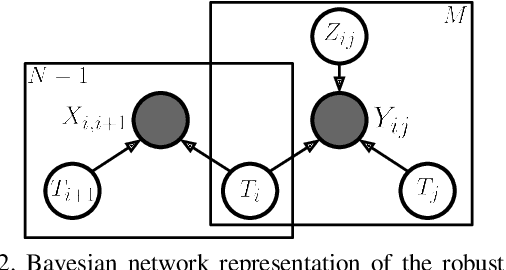
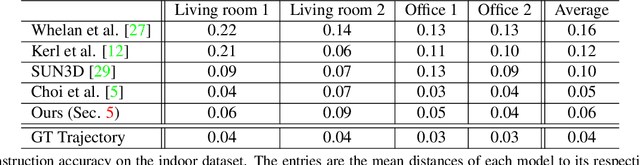
Outlier feature matches and loop-closures that survived front-end data association can lead to catastrophic failures in the back-end optimization of large-scale point cloud based 3D reconstruction. To alleviate this problem, we propose a probabilistic approach for robust back-end optimization in the presence of outliers. More specifically, we model the problem as a Bayesian network and solve it using the Expectation-Maximization algorithm. Our approach leverages on a long-tail Cauchy distribution to suppress outlier feature matches in the odometry constraints, and a Cauchy-Uniform mixture model with a set of binary latent variables to simultaneously suppress outlier loop-closure constraints and outlier feature matches in the inlier loop-closure constraints. Furthermore, we show that by using a Gaussian-Uniform mixture model, our approach degenerates to the formulation of a state-of-the-art approach for robust indoor reconstruction. Experimental results demonstrate that our approach has comparable performance with the state-of-the-art on a benchmark indoor dataset, and outperforms it on a large-scale outdoor dataset. Our source code can be found on the project website.
3DFeat-Net: Weakly Supervised Local 3D Features for Point Cloud Registration
Jul 25, 2018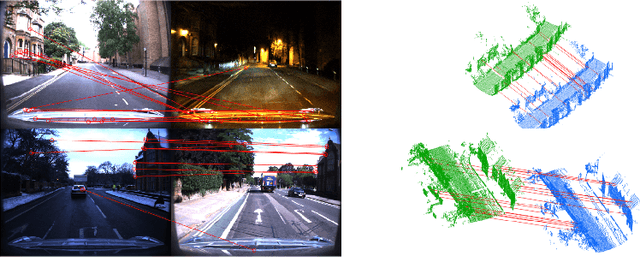

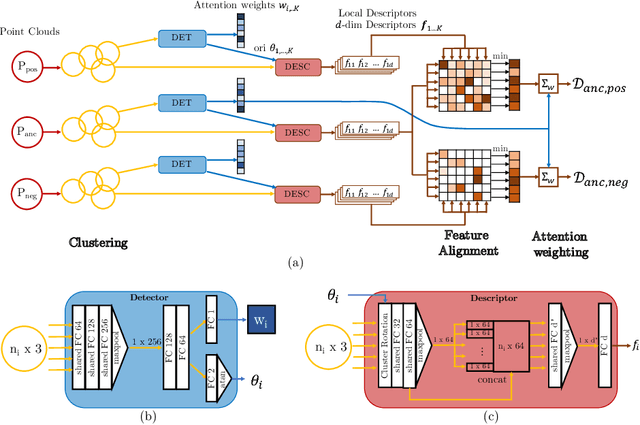
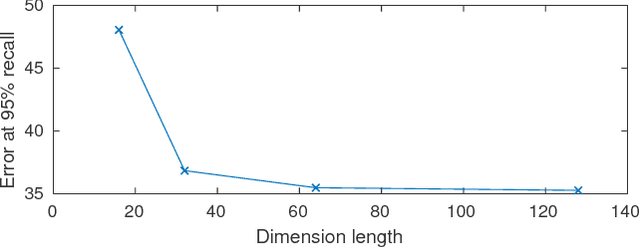
In this paper, we propose the 3DFeat-Net which learns both 3D feature detector and descriptor for point cloud matching using weak supervision. Unlike many existing works, we do not require manual annotation of matching point clusters. Instead, we leverage on alignment and attention mechanisms to learn feature correspondences from GPS/INS tagged 3D point clouds without explicitly specifying them. We create training and benchmark outdoor Lidar datasets, and experiments show that 3DFeat-Net obtains state-of-the-art performance on these gravity-aligned datasets.