 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRPM-Net: Robust Point Matching using Learned Features
Paper and Code
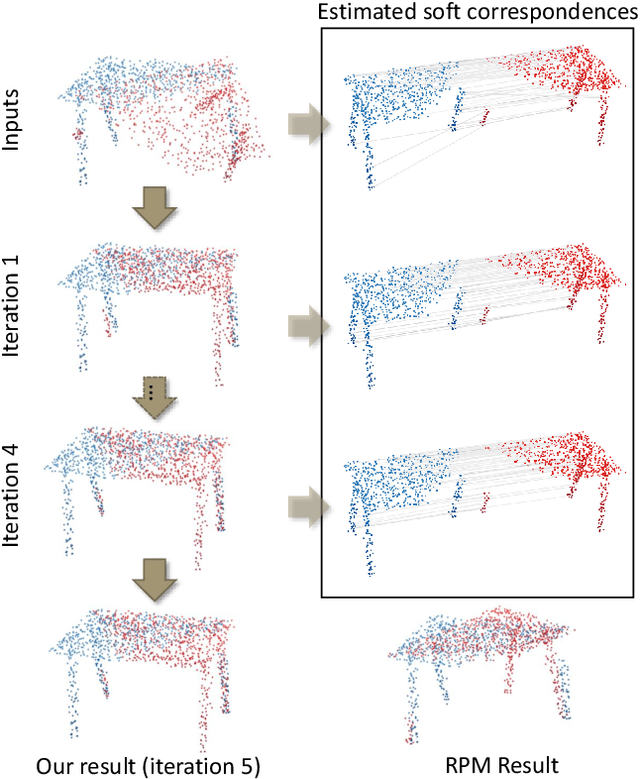
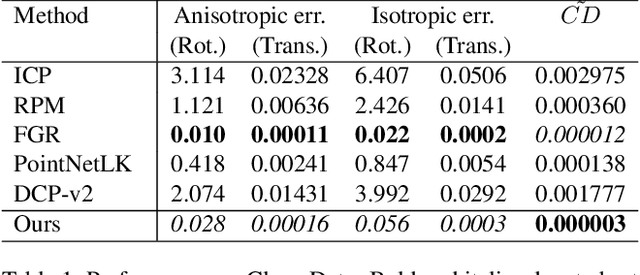
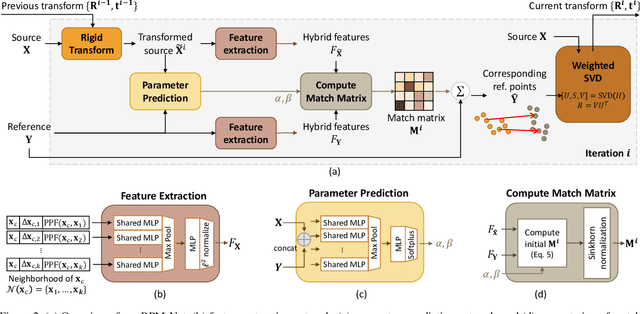
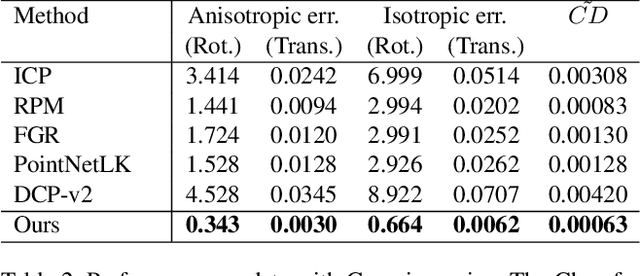
Iterative Closest Point (ICP) solves the rigid point cloud registration problem iteratively in two steps: (1) make hard assignments of spatially closest point correspondences, and then (2) find the least-squares rigid transformation. The hard assignments of closest point correspondences based on spatial distances are sensitive to the initial rigid transformation and noisy/outlier points, which often cause ICP to converge to wrong local minima. In this paper, we propose the RPM-Net -- a less sensitive to initialization and more robust deep learning-based approach for rigid point cloud registration. To this end, our network uses the differentiable Sinkhorn layer and annealing to get soft assignments of point correspondences from hybrid features learned from both spatial coordinates and local geometry. To further improve registration performance, we introduce a secondary network to predict optimal annealing parameters. Unlike some existing methods, our RPM-Net handles missing correspondences and point clouds with partial visibility. Experimental results show that our RPM-Net achieves state-of-the-art performance compared to existing non-deep learning and recent deep learning methods. Our source code is available at the project website https://github.com/yewzijian/RPMNet .