 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImitation Learning for Satellite Attitude Control under Unknown Perturbations
Jul 01, 2025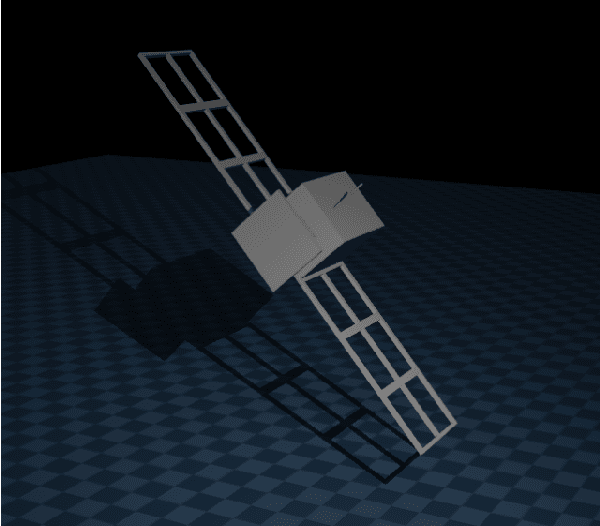
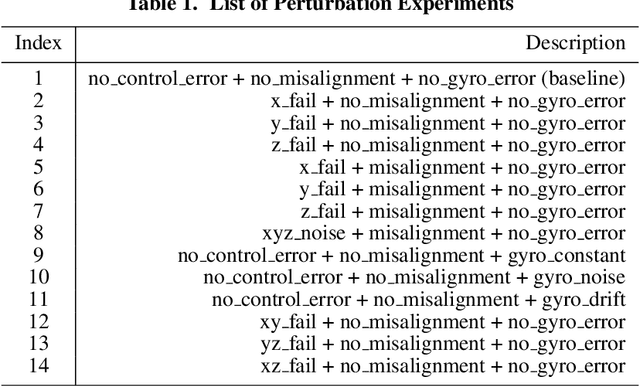
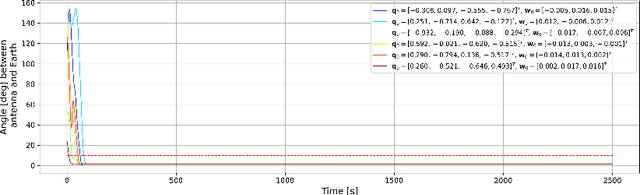
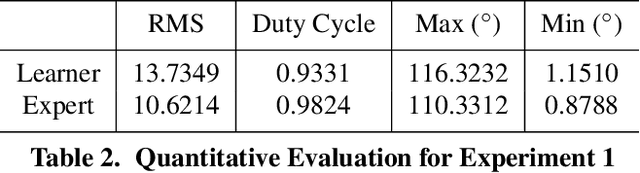
This paper presents a novel satellite attitude control framework that integrates Soft Actor-Critic (SAC) reinforcement learning with Generative Adversarial Imitation Learning (GAIL) to achieve robust performance under various unknown perturbations. Traditional control techniques often rely on precise system models and are sensitive to parameter uncertainties and external perturbations. To overcome these limitations, we first develop a SAC-based expert controller that demonstrates improved resilience against actuator failures, sensor noise, and attitude misalignments, outperforming our previous results in several challenging scenarios. We then use GAIL to train a learner policy that imitates the expert's trajectories, thereby reducing training costs and improving generalization through expert demonstrations. Preliminary experiments under single and combined perturbations show that the SAC expert can rotate the antenna to a specified direction and keep the antenna orientation reliably stable in most of the listed perturbations. Additionally, the GAIL learner can imitate most of the features from the trajectories generated by the SAC expert. Comparative evaluations and ablation studies confirm the effectiveness of the SAC algorithm and reward shaping. The integration of GAIL further reduces sample complexity and demonstrates promising imitation capabilities, paving the way for more intelligent and autonomous spacecraft control systems.
Knolling bot 2.0: Enhancing Object Organization with Self-supervised Graspability Estimation
Oct 30, 2023Building on recent advancements in transformer based approaches for domestic robots performing knolling, the art of organizing scattered items into neat arrangements. This paper introduces Knolling bot 2.0. Recognizing the challenges posed by piles of objects or items situated closely together, this upgraded system incorporates a self-supervised graspability estimation model. If objects are deemed ungraspable, an additional behavior will be executed to separate the objects before knolling the table. By integrating this grasp prediction mechanism with existing visual perception and transformer based knolling models, an advanced system capable of decluttering and organizing even more complex and densely populated table settings is demonstrated. Experimental evaluations demonstrate the effectiveness of this module, yielding a graspability prediction accuracy of 95.7%.
Knolling bot: A Transformer-based Approach to Organizing a Messy Table
Oct 06, 2023In this study, we propose an approach to equip domestic robots with the ability to perform simple household tidying tasks. We focus specifically on 'knolling,' an activity related to organizing scattered items into neat and space-efficient arrangements. Unlike the uniformity of industrial environments, household settings present unique challenges due to their diverse array of items and the subjectivity of tidiness. Here, we draw inspiration from natural language processing (NLP) and utilize a transformer-based approach that predicts the next position of an item in a sequence of neatly positioned items. We integrate the knolling model with a visual perception model and a physical robot arm to demonstrate a machine that declutters and organizes a dozen freeform items of various shapes and sizes.