 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge Language Model-based Human-Agent Collaboration for Complex Task Solving
Feb 20, 2024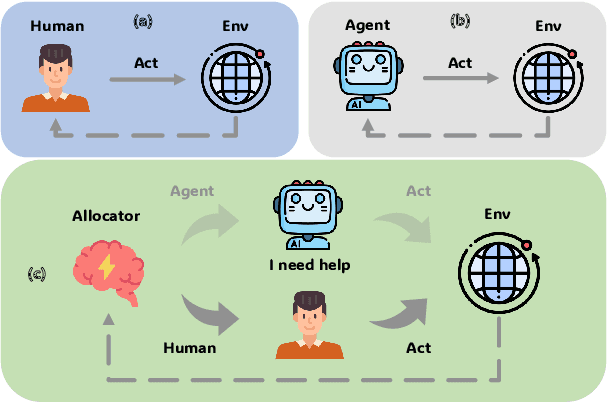
In recent developments within the research community, the integration of Large Language Models (LLMs) in creating fully autonomous agents has garnered significant interest. Despite this, LLM-based agents frequently demonstrate notable shortcomings in adjusting to dynamic environments and fully grasping human needs. In this work, we introduce the problem of LLM-based human-agent collaboration for complex task-solving, exploring their synergistic potential. In addition, we propose a Reinforcement Learning-based Human-Agent Collaboration method, ReHAC. This approach includes a policy model designed to determine the most opportune stages for human intervention within the task-solving process. We construct a human-agent collaboration dataset to train this policy model in an offline reinforcement learning environment. Our validation tests confirm the model's effectiveness. The results demonstrate that the synergistic efforts of humans and LLM-based agents significantly improve performance in complex tasks, primarily through well-planned, limited human intervention. Datasets and code are available at: https://github.com/XueyangFeng/ReHAC.