 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge Language Model guided Deep Reinforcement Learning for Decision Making in Autonomous Driving
Dec 24, 2024Deep reinforcement learning (DRL) shows promising potential for autonomous driving decision-making. However, DRL demands extensive computational resources to achieve a qualified policy in complex driving scenarios due to its low learning efficiency. Moreover, leveraging expert guidance from human to enhance DRL performance incurs prohibitively high labor costs, which limits its practical application. In this study, we propose a novel large language model (LLM) guided deep reinforcement learning (LGDRL) framework for addressing the decision-making problem of autonomous vehicles. Within this framework, an LLM-based driving expert is integrated into the DRL to provide intelligent guidance for the learning process of DRL. Subsequently, in order to efficiently utilize the guidance of the LLM expert to enhance the performance of DRL decision-making policies, the learning and interaction process of DRL is enhanced through an innovative expert policy constrained algorithm and a novel LLM-intervened interaction mechanism. Experimental results demonstrate that our method not only achieves superior driving performance with a 90\% task success rate but also significantly improves the learning efficiency and expert guidance utilization efficiency compared to state-of-the-art baseline algorithms. Moreover, the proposed method enables the DRL agent to maintain consistent and reliable performance in the absence of LLM expert guidance. The code and supplementary videos are available at https://bitmobility.github.io/LGDRL/.
GPS Attack Detection and Mitigation for Safe Autonomous Driving using Image and Map based Lateral Direction Localization
Oct 09, 2023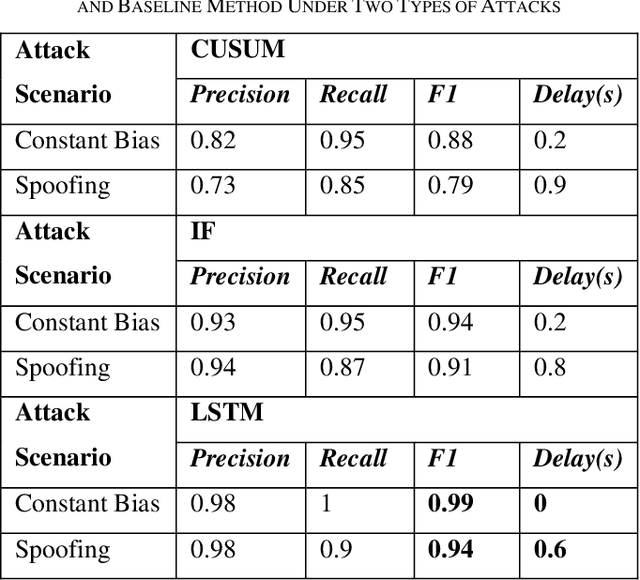
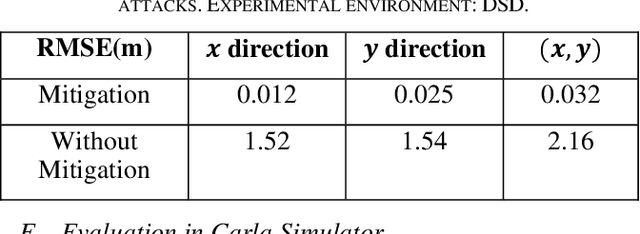
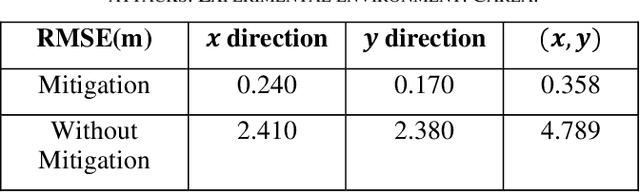
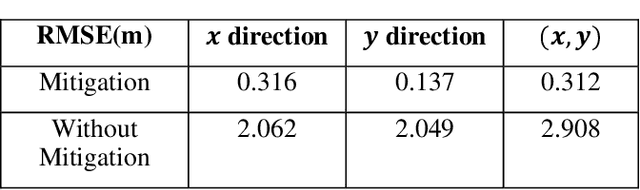
The accuracy and robustness of vehicle localization are critical for achieving safe and reliable high-level autonomy. Recent results show that GPS is vulnerable to spoofing attacks, which is one major threat to autonomous driving. In this paper, a novel anomaly detection and mitigation method against GPS attacks that utilizes onboard camera and high-precision maps is proposed to ensure accurate vehicle localization. First, lateral direction localization in driving lanes is calculated by camera-based lane detection and map matching respectively. Then, a real-time detector for GPS spoofing attack is developed to evaluate the localization data. When the attack is detected, a multi-source fusion-based localization method using Unscented Kalman filter is derived to mitigate GPS attack and improve the localization accuracy. The proposed method is validated in various scenarios in Carla simulator and open-source public dataset to demonstrate its effectiveness in timely GPS attack detection and data recovery.