Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn-line non-overlapping camera calibration net
Feb 19, 2020
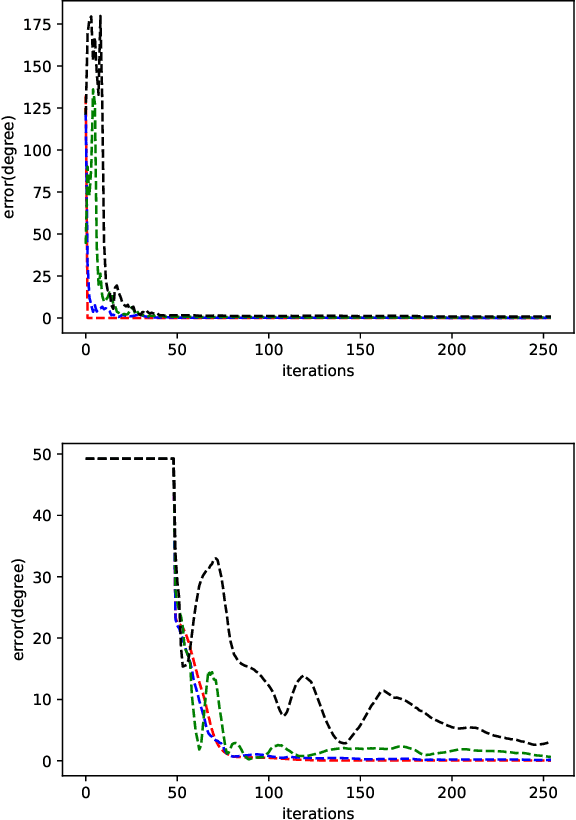

We propose an easy-to-use non-overlapping camera calibration method. First, successive images are fed to a PoseNet-based network to obtain ego-motion of cameras between frames. Next, the pose between cameras are estimated. Instead of using a batch method, we propose an on-line method of the inter-camera pose estimation. Furthermore, we implement the entire procedure on a computation graph. Experiments with simulations and the KITTI dataset show the proposed method to be effective in simulation.
* in Proc. of MIRU2018
* 7 pages
* 7 pages
Via