 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeXRoute Environment: A Novel Reinforcement Learning Environment for Routing
May 23, 2023Routing is a crucial and time-consuming stage in modern design automation flow for advanced technology nodes. Great progress in the field of reinforcement learning makes it possible to use those approaches to improve the routing quality and efficiency. However, the scale of the routing problems solved by reinforcement learning-based methods in recent studies is too small for these methods to be used in commercial EDA tools. We introduce the XRoute Environment, a new reinforcement learning environment where agents are trained to select and route nets in an advanced, end-to-end routing framework. Novel algorithms and ideas can be quickly tested in a safe and reproducible manner in it. The resulting environment is challenging, easy to use, customize and add additional scenarios, and it is available under a permissive open-source license. In addition, it provides support for distributed deployment and multi-instance experiments. We propose two tasks for learning and build a full-chip test bed with routing benchmarks of various region sizes. We also pre-define several static routing regions with different pin density and number of nets for easier learning and testing. For net ordering task, we report baseline results for two widely used reinforcement learning algorithms (PPO and DQN) and one searching-based algorithm (TritonRoute). The XRoute Environment will be available at https://github.com/xplanlab/xroute_env.
Retrosynthetic Planning with Experience-Guided Monte Carlo Tree Search
Dec 11, 2021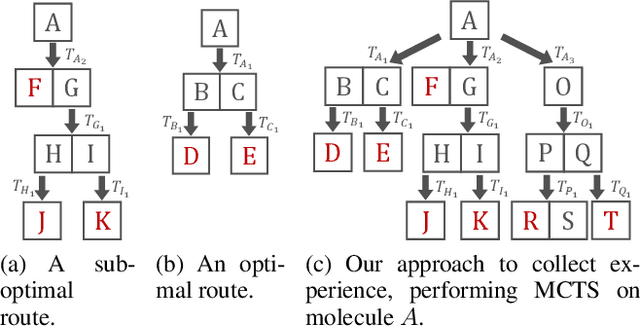
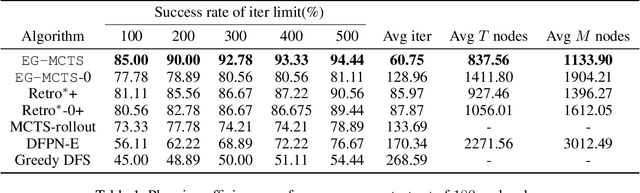

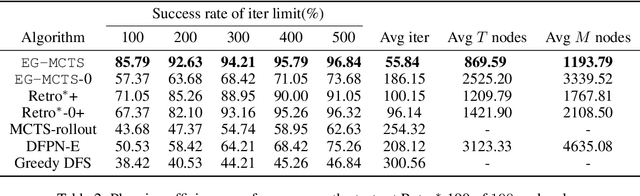
Retrosynthetic planning problem is to analyze a complex molecule and give a synthetic route using simple building blocks. The huge number of chemical reactions leads to a combinatorial explosion of possibilities, and even the experienced chemists could not select the most promising transformations. The current approaches rely on human-defined or machine-trained score functions which have limited chemical knowledge or use expensive estimation methods such as rollout to guide the search. In this paper, we propose {\tt MCTS}, a novel MCTS-based retrosynthetic planning approach, to deal with retrosynthetic planning problem. Instead of exploiting rollout, we build an Experience Guidance Network to learn knowledge from synthetic experiences during the search. Experiments on benchmark USPTO datasets show that, our {\tt MCTS} gains significant improvement over state-of-the-art approaches both in efficiency and effectiveness.