 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimating 2D Camera Motion with Hybrid Motion Basis
Jul 30, 2025Estimating 2D camera motion is a fundamental computer vision task that models the projection of 3D camera movements onto the 2D image plane. Current methods rely on either homography-based approaches, limited to planar scenes, or meshflow techniques that use grid-based local homographies but struggle with complex non-linear transformations. A key insight of our work is that combining flow fields from different homographies creates motion patterns that cannot be represented by any single homography. We introduce CamFlow, a novel framework that represents camera motion using hybrid motion bases: physical bases derived from camera geometry and stochastic bases for complex scenarios. Our approach includes a hybrid probabilistic loss function based on the Laplace distribution that enhances training robustness. For evaluation, we create a new benchmark by masking dynamic objects in existing optical flow datasets to isolate pure camera motion. Experiments show CamFlow outperforms state-of-the-art methods across diverse scenarios, demonstrating superior robustness and generalization in zero-shot settings. Code and datasets are available at our project page: https://lhaippp.github.io/CamFlow/.
Single Image Rolling Shutter Removal with Diffusion Models
Jul 03, 2024

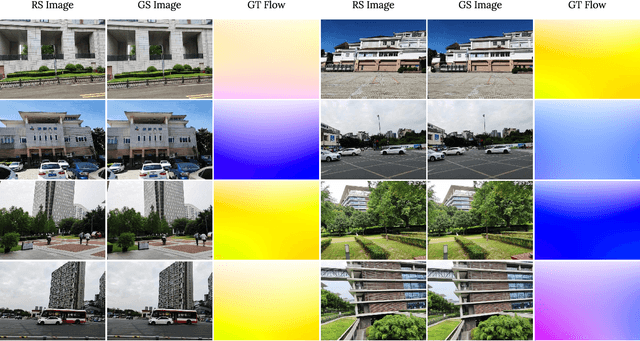
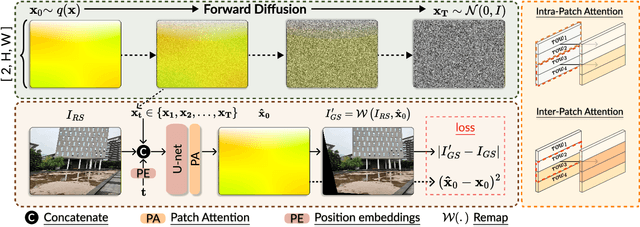
We present RS-Diffusion, the first Diffusion Models-based method for single-frame Rolling Shutter (RS) correction. RS artifacts compromise visual quality of frames due to the row wise exposure of CMOS sensors. Most previous methods have focused on multi-frame approaches, using temporal information from consecutive frames for the motion rectification. However, few approaches address the more challenging but important single frame RS correction. In this work, we present an ``image-to-motion'' framework via diffusion techniques, with a designed patch-attention module. In addition, we present the RS-Real dataset, comprised of captured RS frames alongside their corresponding Global Shutter (GS) ground-truth pairs. The GS frames are corrected from the RS ones, guided by the corresponding Inertial Measurement Unit (IMU) gyroscope data acquired during capture. Experiments show that our RS-Diffusion surpasses previous single RS correction methods. Our method and proposed RS-Real dataset lay a solid foundation for advancing the field of RS correction.