 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScalable Tactile Sensing for an Omni-adaptive Soft Robot Finger
Feb 29, 2020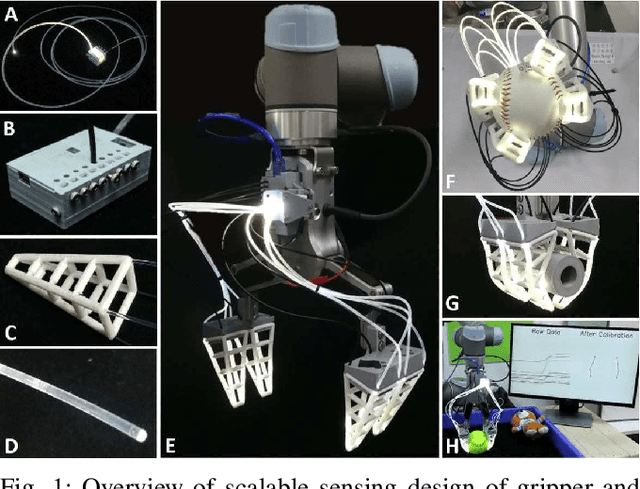
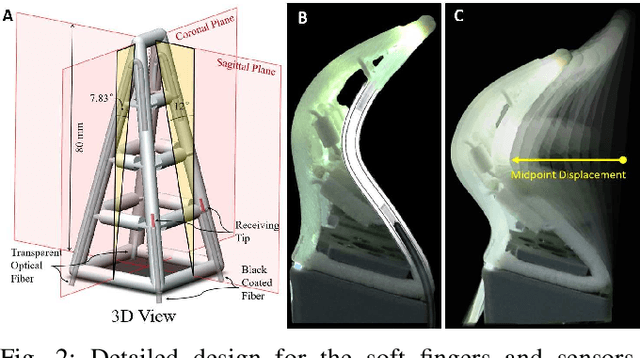
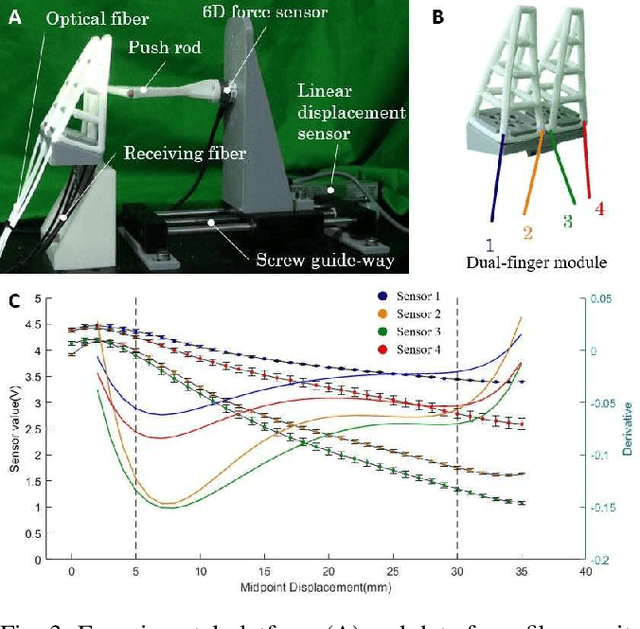

Robotic fingers made of soft material and compliant structures usually lead to superior adaptation when interacting with the unstructured physical environment. In this paper, we present an embedded sensing solution using optical fibers for an omni-adaptive soft robotic finger with exceptional adaptation in all directions. In particular, we managed to insert a pair of optical fibers inside the finger's structural cavity without interfering with its adaptive performance. The resultant integration is scalable as a versatile, low-cost, and moisture-proof solution for physically safe human-robot interaction. In addition, we experimented with our finger design for an object sorting task and identified sectional diameters of 94\% objects within the $\pm$6mm error and measured 80\% of the structural strains within $\pm$0.1mm/mm error. The proposed sensor design opens many doors in future applications of soft robotics for scalable and adaptive physical interactions in the unstructured environment.