 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMMAC-Copilot: Multi-modal Agent Collaboration Operating System Copilot
Apr 28, 2024
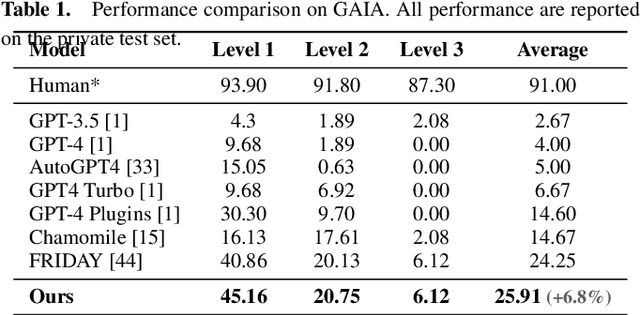
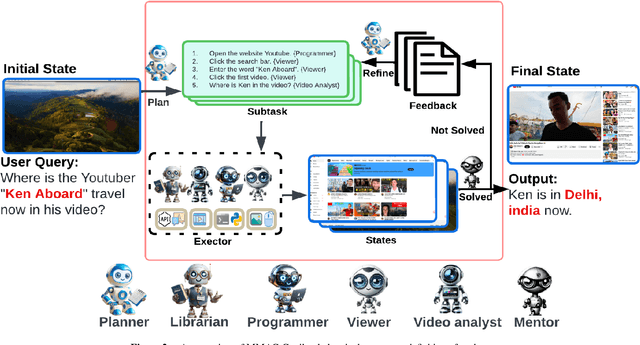
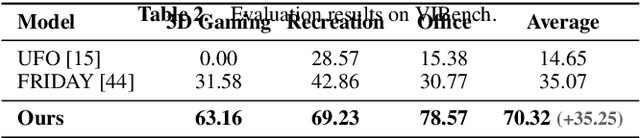
Autonomous virtual agents are often limited by their singular mode of interaction with real-world environments, restricting their versatility. To address this, we propose the Multi-Modal Agent Collaboration framework (MMAC-Copilot), a framework utilizes the collective expertise of diverse agents to enhance interaction ability with operating systems. The framework introduces a team collaboration chain, enabling each participating agent to contribute insights based on their specific domain knowledge, effectively reducing the hallucination associated with knowledge domain gaps. To evaluate the performance of MMAC-Copilot, we conducted experiments using both the GAIA benchmark and our newly introduced Visual Interaction Benchmark (VIBench). VIBench focuses on non-API-interactable applications across various domains, including 3D gaming, recreation, and office scenarios. MMAC-Copilot achieved exceptional performance on GAIA, with an average improvement of 6.8\% over existing leading systems. Furthermore, it demonstrated remarkable capability on VIBench, particularly in managing various methods of interaction within systems and applications. These results underscore MMAC-Copilot's potential in advancing the field of autonomous virtual agents through its innovative approach to agent collaboration.