 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFourier Feature Attribution: A New Efficiency Attribution Method
Apr 02, 2025


The study of neural networks from the perspective of Fourier features has garnered significant attention. While existing analytical research suggests that neural networks tend to learn low-frequency features, a clear attribution method for identifying the specific learned Fourier features has remained elusive. To bridge this gap, we propose a novel Fourier feature attribution method grounded in signal decomposition theory. Additionally, we analyze the differences between game-theoretic attribution metrics for Fourier and spatial domain features, demonstrating that game-theoretic evaluation metrics are better suited for Fourier-based feature attribution. Our experiments show that Fourier feature attribution exhibits superior feature selection capabilities compared to spatial domain attribution methods. For instance, in the case of Vision Transformers (ViTs) on the ImageNet dataset, only $8\%$ of the Fourier features are required to maintain the original predictions for $80\%$ of the samples. Furthermore, we compare the specificity of features identified by our method against traditional spatial domain attribution methods. Results reveal that Fourier features exhibit greater intra-class concentration and inter-class distinctiveness, indicating their potential for more efficient classification and explainable AI algorithms.
FreqX: What neural networks learn is what network designers say
Nov 27, 2024Personalized Federal learning(PFL) allows clients to cooperatively train a personalized model without disclosing their private dataset. However, PFL suffers from Non-IID, heterogeneous devices, lack of fairness, and unclear contribution which urgently need the interpretability of deep learning model to overcome these challenges. These challenges proposed new demands for interpretability. Low cost, privacy, and detailed information. There is no current interpretability method satisfying them. In this paper, we propose a novel interpretability method \emph{FreqX} by introducing Signal Processing and Information Theory. Our experiments show that the explanation results of FreqX contain both attribution information and concept information. FreqX runs at least 10 times faster than the baselines which contain concept information.
SMOKE: Single-Stage Monocular 3D Object Detection via Keypoint Estimation
Feb 24, 2020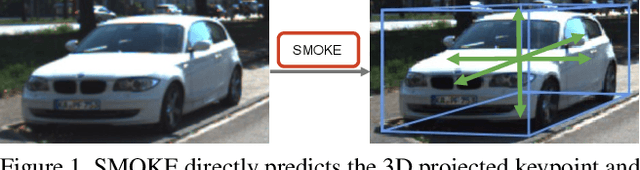



Estimating 3D orientation and translation of objects is essential for infrastructure-less autonomous navigation and driving. In case of monocular vision, successful methods have been mainly based on two ingredients: (i) a network generating 2D region proposals, (ii) a R-CNN structure predicting 3D object pose by utilizing the acquired regions of interest. We argue that the 2D detection network is redundant and introduces non-negligible noise for 3D detection. Hence, we propose a novel 3D object detection method, named SMOKE, in this paper that predicts a 3D bounding box for each detected object by combining a single keypoint estimate with regressed 3D variables. As a second contribution, we propose a multi-step disentangling approach for constructing the 3D bounding box, which significantly improves both training convergence and detection accuracy. In contrast to previous 3D detection techniques, our method does not require complicated pre/post-processing, extra data, and a refinement stage. Despite of its structural simplicity, our proposed SMOKE network outperforms all existing monocular 3D detection methods on the KITTI dataset, giving the best state-of-the-art result on both 3D object detection and Bird's eye view evaluation. The code will be made publicly available.