 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Per-Garment Virtual Try-On with Temporal Consistency for Loose-Fitting Garments
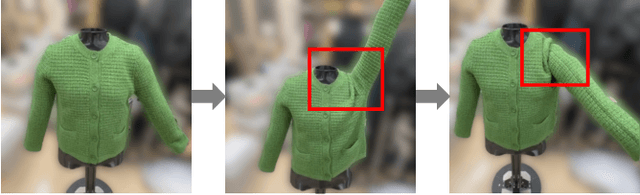
Jun 14, 2025Per-garment virtual try-on methods collect garment-specific datasets and train networks tailored to each garment to achieve superior results. However, these approaches often struggle with loose-fitting garments due to two key limitations: (1) They rely on human body semantic maps to align garments with the body, but these maps become unreliable when body contours are obscured by loose-fitting garments, resulting in degraded outcomes; (2) They train garment synthesis networks on a per-frame basis without utilizing temporal information, leading to noticeable jittering artifacts. To address these challenges, we propose a two-stage approach for robust semantic map estimation. First, we extract a garment-invariant representation from the raw input image. This representation is then passed through an auxiliary network to estimate the semantic map. This enhances the robustness of semantic map estimation under loose-fitting garments during garment-specific dataset generation. Furthermore, we introduce a recurrent garment synthesis framework that incorporates temporal dependencies to improve frame-to-frame coherence while maintaining real-time performance. We conducted qualitative and quantitative evaluations to demonstrate that our method outperforms existing approaches in both image quality and temporal coherence. Ablation studies further validate the effectiveness of the garment-invariant representation and the recurrent synthesis framework.
Low-Barrier Dataset Collection with Real Human Body for Interactive Per-Garment Virtual Try-On
Jun 12, 2025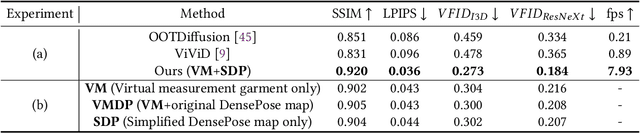

Existing image-based virtual try-on methods are often limited to the front view and lack real-time performance. While per-garment virtual try-on methods have tackled these issues by capturing per-garment datasets and training per-garment neural networks, they still encounter practical limitations: (1) the robotic mannequin used to capture per-garment datasets is prohibitively expensive for widespread adoption and fails to accurately replicate natural human body deformation; (2) the synthesized garments often misalign with the human body. To address these challenges, we propose a low-barrier approach for collecting per-garment datasets using real human bodies, eliminating the necessity for a customized robotic mannequin. We also introduce a hybrid person representation that enhances the existing intermediate representation with a simplified DensePose map. This ensures accurate alignment of synthesized garment images with the human body and enables human-garment interaction without the need for customized wearable devices. We performed qualitative and quantitative evaluations against other state-of-the-art image-based virtual try-on methods and conducted ablation studies to demonstrate the superiority of our method regarding image quality and temporal consistency. Finally, our user study results indicated that most participants found our virtual try-on system helpful for making garment purchasing decisions.
Analytical Derivatives for Differentiable Renderer: 3D Pose Estimation by Silhouette Consistency
Jun 19, 2019



Differentiable render is widely used in optimization-based 3D reconstruction which requires gradients from differentiable operations for gradient-based optimization. The existing differentiable renderers obtain the gradients of rendering via numerical technique which is of low accuracy and efficiency. Motivated by this fact, a differentiable mesh renderer with analytical gradients is proposed. The main obstacle of rasterization based rendering being differentiable is the discrete sampling operation. To make the rasterization differentiable, the pixel intensity is defined as a double integral over the pixel area and the integral is approximated by anti-aliasing with an average filter. Then the analytical gradients with respect to the vertices coordinates can be derived from the continuous definition of pixel intensity. To demonstrate the effectiveness and efficiency of the proposed differentiable renderer, experiments of 3D pose estimation by only multi-viewpoint silhouettes were conducted. The experimental results show that 3D pose estimation without 3D and 2D joints supervision is capable of producing competitive results both qualitatively and quantitatively. The experimental results also show that the proposed differentiable renderer is of higher accuracy and efficiency compared with previous method of differentiable renderer.
A Novel Self-Intersection Penalty Term for Statistical Body Shape Models and Its Applications in 3D Pose Estimation
Jan 24, 2019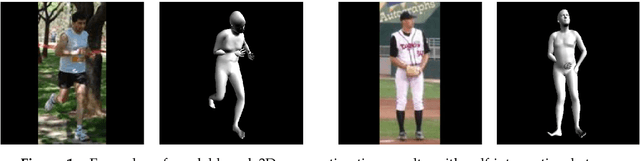


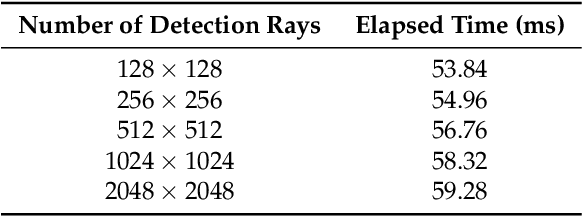
Statistical body shape models are widely used in 3D pose estimation due to their low-dimensional parameters representation. However, it is difficult to avoid self-intersection between body parts accurately. Motivated by this fact, we proposed a novel self-intersection penalty term for statistical body shape models applied in 3D pose estimation. To avoid the trouble of computing self-intersection for complex surfaces like the body meshes, the gradient of our proposed self-intersection penalty term is manually derived from the perspective of geometry. First, the self-intersection penalty term is defined as the volume of the self-intersection region. To calculate the partial derivatives with respect to the coordinates of the vertices, we employed detection rays to divide vertices of statistical body shape models into different groups depending on whether the vertex is in the region of self-intersection. Second, the partial derivatives could be easily derived by the normal vectors of neighboring triangles of the vertices. Finally, this penalty term could be applied in gradient-based optimization algorithms to remove the self-intersection of triangular meshes without using any approximation. Qualitative and quantitative evaluations were conducted to demonstrate the effectiveness and generality of our proposed method compared with previous approaches. The experimental results show that our proposed penalty term can avoid self-intersection to exclude unreasonable predictions and improves the accuracy of 3D pose estimation indirectly. Further more, the proposed method could be employed universally in triangular mesh based 3D reconstruction.