 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWAKESET: A Large-Scale, High-Reynolds Number Flow Dataset for Machine Learning of Turbulent Wake Dynamics
Feb 01, 2026Machine learning (ML) offers transformative potential for computational fluid dynamics (CFD), promising to accelerate simulations, improve turbulence modelling, and enable real-time flow prediction and control-capabilities that could fundamentally change how engineers approach fluid dynamics problems. However, the exploration of ML in fluid dynamics is critically hampered by the scarcity of large, diverse, and high-fidelity datasets suitable for training robust models. This limitation is particularly acute for highly turbulent flows, which dominate practical engineering applications yet remain computationally prohibitive to simulate at scale. High-Reynolds number turbulent datasets are essential for ML models to learn the complex, multi-scale physics characteristic of real-world flows, enabling generalisation beyond the simplified, low-Reynolds number regimes often represented in existing datasets. This paper introduces WAKESET, a novel, large-scale CFD dataset of highly turbulent flows, designed to address this critical gap. The dataset captures the complex hydrodynamic interactions during the underwater recovery of an autonomous underwater vehicle by a larger extra-large uncrewed underwater vehicle. It comprises 1,091 high-fidelity Reynolds-Averaged Navier-Stokes simulations, augmented to 4,364 instances, covering a wide operational envelope of speeds (up to Reynolds numbers of 1.09 x 10^8) and turning angles. This work details the motivation for this new dataset by reviewing existing resources, outlines the hydrodynamic modelling and validation underpinning its creation, and describes its structure. The dataset's focus on a practical engineering problem, its scale, and its high turbulence characteristics make it a valuable resource for developing and benchmarking ML models for flow field prediction, surrogate modelling, and autonomous navigation in complex underwater environments.
Wake-Informed 3D Path Planning for Autonomous Underwater Vehicles Using A* and Neural Network Approximations
Feb 04, 2025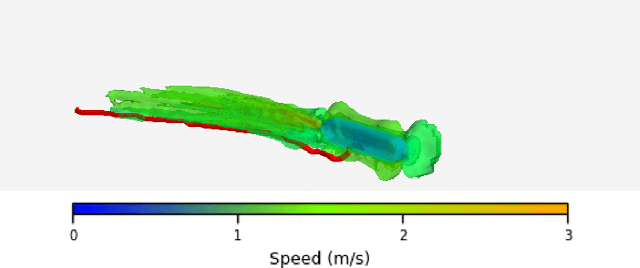
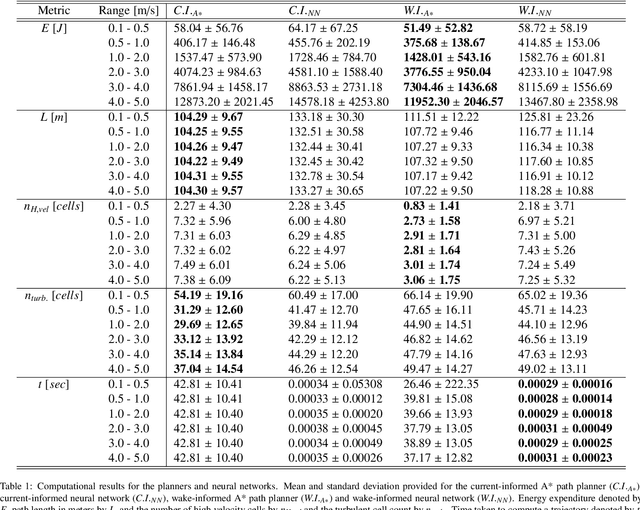
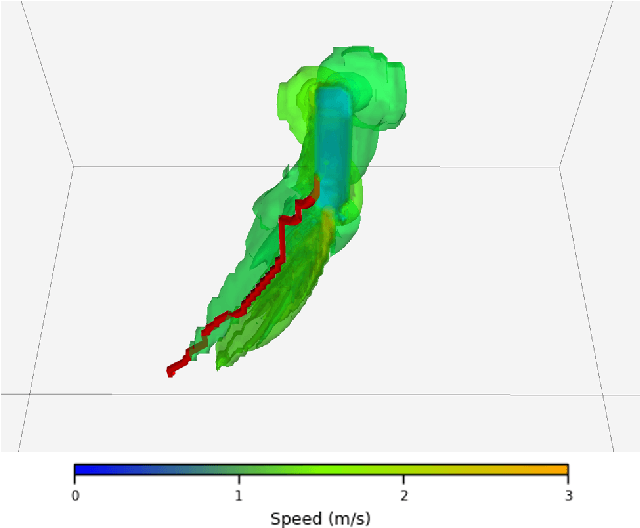
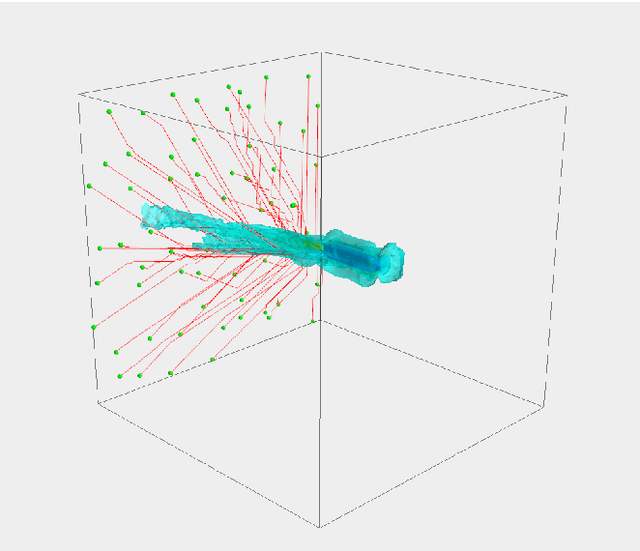
Autonomous Underwater Vehicles (AUVs) encounter significant energy, control and navigation challenges in complex underwater environments, particularly during close-proximity operations, such as launch and recovery (LAR), where fluid interactions and wake effects present additional navigational and energy challenges. Traditional path planning methods fail to incorporate these detailed wake structures, resulting in increased energy consumption, reduced control stability, and heightened safety risks. This paper presents a novel wake-informed, 3D path planning approach that fully integrates localized wake effects and global currents into the planning algorithm. Two variants of the A* algorithm - a current-informed planner and a wake-informed planner - are created to assess its validity and two neural network models are then trained to approximate these planners for real-time applications. Both the A* planners and NN models are evaluated using important metrics such as energy expenditure, path length, and encounters with high-velocity and turbulent regions. The results demonstrate a wake-informed A* planner consistently achieves the lowest energy expenditure and minimizes encounters with high-velocity regions, reducing energy consumption by up to 11.3%. The neural network models are observed to offer computational speedup of 6 orders of magnitude, but exhibit 4.51 - 19.79% higher energy expenditures and 9.81 - 24.38% less optimal paths. These findings underscore the importance of incorporating detailed wake structures into traditional path planning algorithms and the benefits of neural network approximations to enhance energy efficiency and operational safety for AUVs in complex 3D domains.
A generalised novel loss function for computational fluid dynamics
Nov 26, 2024



Computational fluid dynamics (CFD) simulations are crucial in automotive, aerospace, maritime and medical applications, but are limited by the complexity, cost and computational requirements of directly calculating the flow, often taking days of compute time. Machine-learning architectures, such as controlled generative adversarial networks (cGANs) hold significant potential in enhancing or replacing CFD investigations, due to cGANs ability to approximate the underlying data distribution of a dataset. Unlike traditional cGAN applications, where the entire image carries information, CFD data contains small regions of highly variant data, immersed in a large context of low variance that is of minimal importance. This renders most existing deep learning techniques that give equal importance to every portion of the data during training, inefficient. To mitigate this, a novel loss function is proposed called Gradient Mean Squared Error (GMSE) which automatically and dynamically identifies the regions of importance on a field-by-field basis, assigning appropriate weights according to the local variance. To assess the effectiveness of the proposed solution, three identical networks were trained; optimised with Mean Squared Error (MSE) loss, proposed GMSE loss and a dynamic variant of GMSE (DGMSE). The novel loss function resulted in faster loss convergence, correlating to reduced training time, whilst also displaying an 83.6% reduction in structural similarity error between the generated field and ground truth simulations, a 76.6% higher maximum rate of loss and an increased ability to fool a discriminator network. It is hoped that this loss function will enable accelerated machine learning within computational fluid dynamics.