 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Paging with a Vanishing Regret
Nov 19, 2020This paper considers a variant of the online paging problem, where the online algorithm has access to multiple predictors, each producing a sequence of predictions for the page arrival times. The predictors may have occasional prediction errors and it is assumed that at least one of them makes a sublinear number of prediction errors in total. Our main result states that this assumption suffices for the design of a randomized online algorithm whose time-average regret with respect to the optimal offline algorithm tends to zero as the time tends to infinity. This holds (with different regret bounds) for both the full information access model, where in each round, the online algorithm gets the predictions of all predictors, and the bandit access model, where in each round, the online algorithm queries a single predictor. While online algorithms that exploit inaccurate predictions have been a topic of growing interest in the last few years, to the best of our knowledge, this is the first paper that studies this topic in the context of multiple predictors for an online problem with unbounded request sequences. Moreover, to the best of our knowledge, this is also the first paper that aims for (and achieves) online algorithms with a vanishing regret for a classic online problem under reasonable assumptions.
Deterministic Leader Election in Programmable Matter
May 02, 2019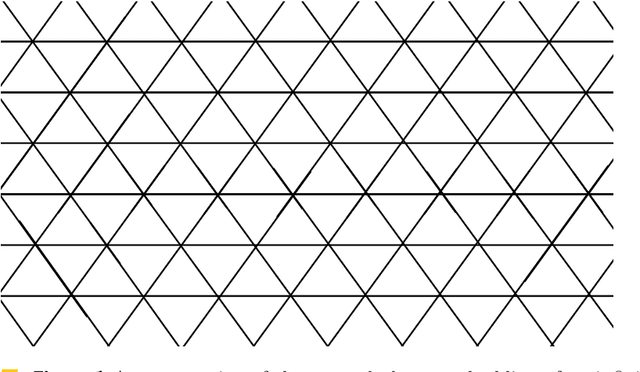
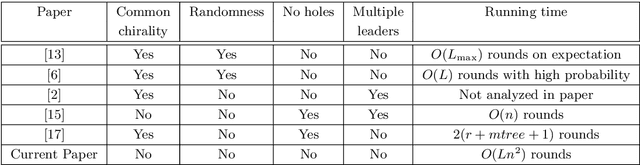
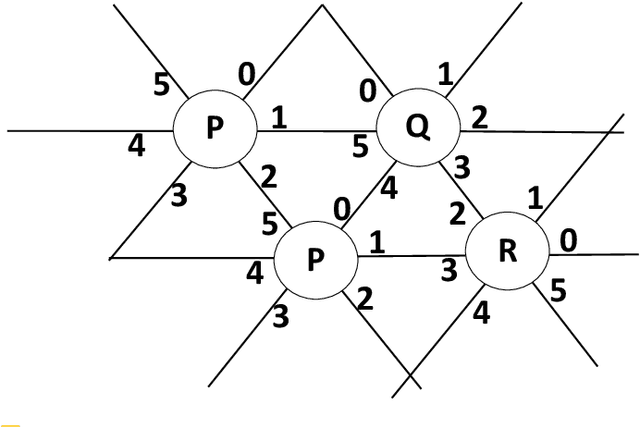
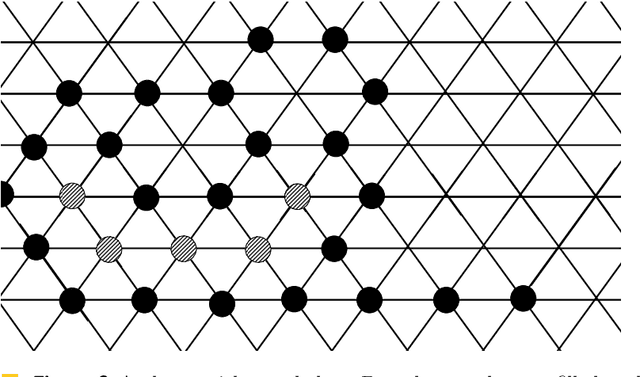
Addressing a fundamental problem in programmable matter, we present the first deterministic algorithm to elect a unique leader in a system of connected amoebots assuming only that amoebots are initially contracted. Previous algorithms either used randomization, made various assumptions (shapes with no holes, or known shared chirality), or elected several co-leaders in some cases. Some of the building blocks we introduce in constructing the algorithm are of interest by themselves, especially the procedure we present for reaching common chirality among the amoebots. Given the leader election and the chirality agreement building block, it is known that various tasks in programmable matter can be performed or improved. The main idea of the new algorithm is the usage of the ability of the amoebots to move, which previous leader election algorithms have not used.