 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeterministic Leader Election in Programmable Matter
Paper and Code
May 02, 2019
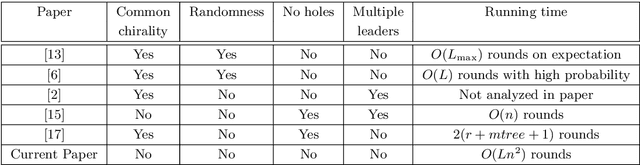
Addressing a fundamental problem in programmable matter, we present the first deterministic algorithm to elect a unique leader in a system of connected amoebots assuming only that amoebots are initially contracted. Previous algorithms either used randomization, made various assumptions (shapes with no holes, or known shared chirality), or elected several co-leaders in some cases. Some of the building blocks we introduce in constructing the algorithm are of interest by themselves, especially the procedure we present for reaching common chirality among the amoebots. Given the leader election and the chirality agreement building block, it is known that various tasks in programmable matter can be performed or improved. The main idea of the new algorithm is the usage of the ability of the amoebots to move, which previous leader election algorithms have not used.