 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultiTaskDeltaNet: Change Detection-based Image Segmentation for Operando ETEM with Application to Carbon Gasification Kinetics
Jul 22, 2025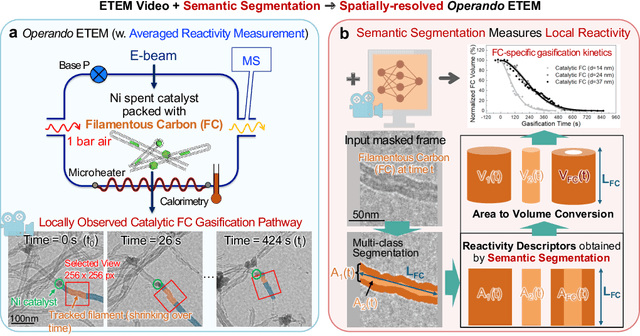
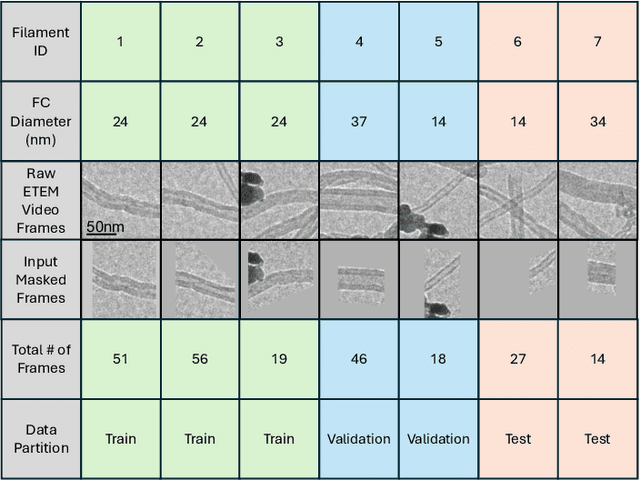


Transforming in-situ transmission electron microscopy (TEM) imaging into a tool for spatially-resolved operando characterization of solid-state reactions requires automated, high-precision semantic segmentation of dynamically evolving features. However, traditional deep learning methods for semantic segmentation often encounter limitations due to the scarcity of labeled data, visually ambiguous features of interest, and small-object scenarios. To tackle these challenges, we introduce MultiTaskDeltaNet (MTDN), a novel deep learning architecture that creatively reconceptualizes the segmentation task as a change detection problem. By implementing a unique Siamese network with a U-Net backbone and using paired images to capture feature changes, MTDN effectively utilizes minimal data to produce high-quality segmentations. Furthermore, MTDN utilizes a multi-task learning strategy to leverage correlations between physical features of interest. In an evaluation using data from in-situ environmental TEM (ETEM) videos of filamentous carbon gasification, MTDN demonstrated a significant advantage over conventional segmentation models, particularly in accurately delineating fine structural features. Notably, MTDN achieved a 10.22% performance improvement over conventional segmentation models in predicting small and visually ambiguous physical features. This work bridges several key gaps between deep learning and practical TEM image analysis, advancing automated characterization of nanomaterials in complex experimental settings.
Cross-platform Prediction of Depression Treatment Outcome Using Location Sensory Data on Smartphones
Mar 10, 2025Currently, depression treatment relies on closely monitoring patients response to treatment and adjusting the treatment as needed. Using self-reported or physician-administrated questionnaires to monitor treatment response is, however, burdensome, costly and suffers from recall bias. In this paper, we explore using location sensory data collected passively on smartphones to predict treatment outcome. To address heterogeneous data collection on Android and iOS phones, the two predominant smartphone platforms, we explore using domain adaptation techniques to map their data to a common feature space, and then use the data jointly to train machine learning models. Our results show that this domain adaptation approach can lead to significantly better prediction than that with no domain adaptation. In addition, our results show that using location features and baseline self-reported questionnaire score can lead to F1 score up to 0.67, comparable to that obtained using periodic self-reported questionnaires, indicating that using location data is a promising direction for predicting depression treatment outcome.
Semi-Siamese Network for Robust Change Detection Across Different Domains with Applications to 3D Printing
Dec 16, 2022



Automatic defect detection for 3D printing processes, which shares many characteristics with change detection problems, is a vital step for quality control of 3D printed products. However, there are some critical challenges in the current state of practice. First, existing methods for computer vision-based process monitoring typically work well only under specific camera viewpoints and lighting situations, requiring expensive pre-processing, alignment, and camera setups. Second, many defect detection techniques are specific to pre-defined defect patterns and/or print schematics. In this work, we approach the automatic defect detection problem differently using a novel Semi-Siamese deep learning model that directly compares a reference schematic of the desired print and a camera image of the achieved print. The model then solves an image segmentation problem, identifying the locations of defects with respect to the reference frame. Unlike most change detection problems, our model is specially developed to handle images coming from different domains and is robust against perturbations in the imaging setup such as camera angle and illumination. Defect localization predictions were made in 2.75 seconds per layer using a standard MacBookPro, which is comparable to the typical tens of seconds or less for printing a single layer on an inkjet-based 3D printer, while achieving an F1-score of more than 0.9.