 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Dual-Memory Architecture for Reinforcement Learning on Neuromorphic Platforms
Mar 05, 2021


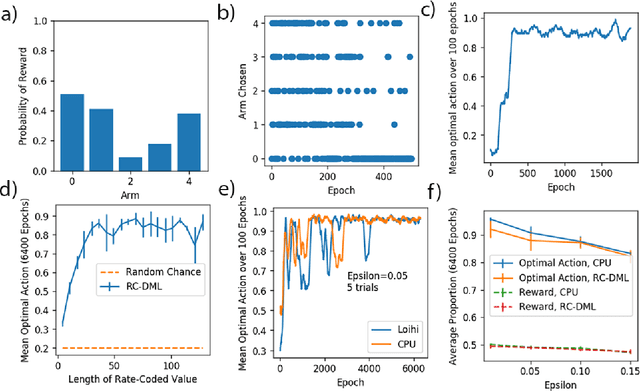
Reinforcement learning (RL) is a foundation of learning in biological systems and provides a framework to address numerous challenges with real-world artificial intelligence applications. Efficient implementations of RL techniques could allow for agents deployed in edge-use cases to gain novel abilities, such as improved navigation, understanding complex situations and critical decision making. Towards this goal, we describe a flexible architecture to carry out reinforcement learning on neuromorphic platforms. This architecture was implemented using an Intel neuromorphic processor and demonstrated solving a variety of tasks using spiking dynamics. Our study proposes a usable energy efficient solution for real-world RL applications and demonstrates applicability of the neuromorphic platforms for RL problems.
Complete stability analysis of a heuristic ADP control design
Jul 28, 2015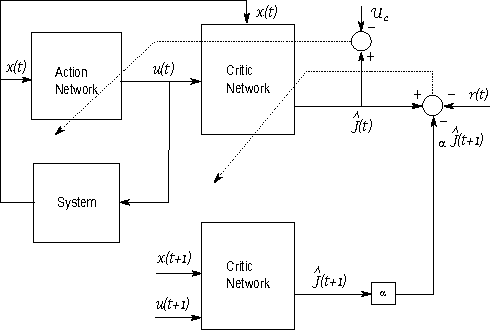
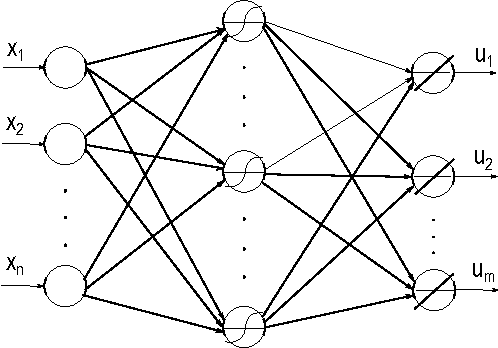
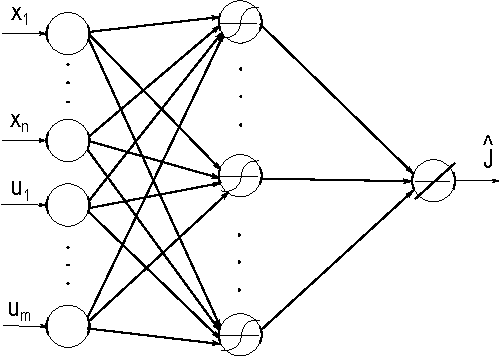
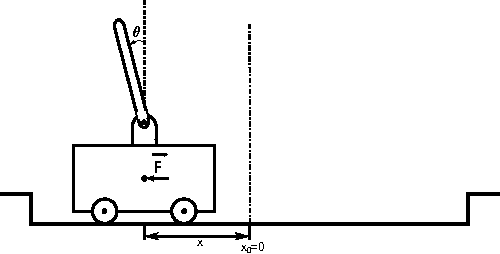
This paper provides new stability results for Action-Dependent Heuristic Dynamic Programming (ADHDP), using a control algorithm that iteratively improves an internal model of the external world in the autonomous system based on its continuous interaction with the environment. We extend previous results by ADHDP control to the case of general multi-layer neural networks with deep learning across all layers. In particular, we show that the introduced control approach is uniformly ultimately bounded (UUB) under specific conditions on the learning rates, without explicit constraints on the temporal discount factor. We demonstrate the benefit of our results to the control of linear and nonlinear systems, including the cart-pole balancing problem. Our results show significantly improved learning and control performance as compared to the state-of-art.
* 20 pages