 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDomain Adaptation Using Adversarial Learning for Autonomous Navigation
May 22, 2018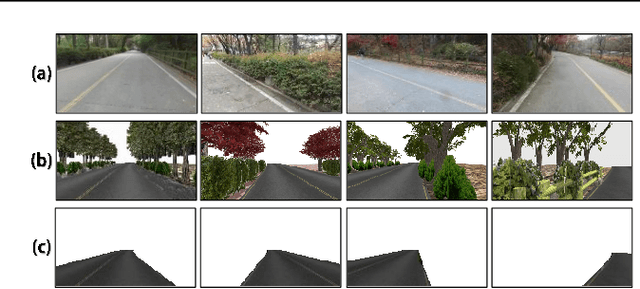
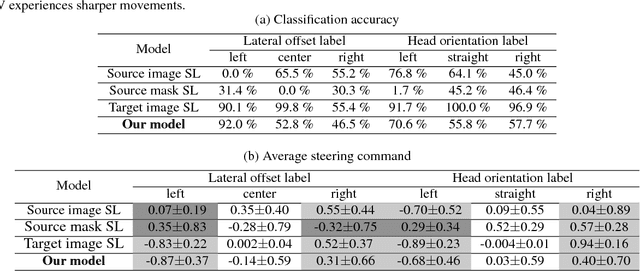
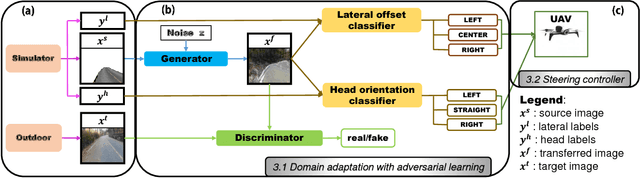
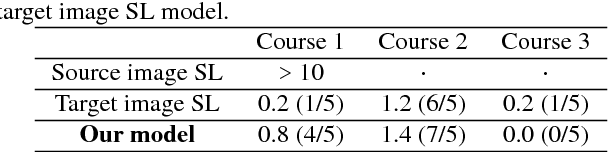
Autonomous navigation has become an increasingly popular machine learning application. Recent advances in deep learning have also resulted in great improvements to autonomous navigation. However, prior outdoor autonomous navigation depends on various expensive sensors or large amounts of real labeled data which is difficult to acquire and sometimes erroneous. The objective of this study is to train an autonomous navigation model that uses a simulator (instead of real labeled data) and an inexpensive monocular camera. In order to exploit the simulator satisfactorily, our proposed method is based on domain adaptation with adversarial learning. Specifically, we propose our model with 1) a dilated residual block in the generator, 2) cycle loss, and 3) style loss to improve the adversarial learning performance for satisfactory domain adaptation. In addition, we perform a theoretical analysis that supports the justification of our proposed method. We present empirical results of navigation in outdoor courses with various intersections using a commercial radio controlled car. We observe that our proposed method allows us to learn a favorable navigation model by generating images with realistic textures. To the best of our knowledge, this is the first work to apply domain adaptation with adversarial learning to autonomous navigation in real outdoor environments. Our proposed method can also be applied to precise image generation or other robotic tasks.