 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Failures to Fixes: LLM-Driven Scenario Repair for Self-Evolving Autonomous Driving
May 28, 2025Ensuring robust and generalizable autonomous driving requires not only broad scenario coverage but also efficient repair of failure cases, particularly those related to challenging and safety-critical scenarios. However, existing scenario generation and selection methods often lack adaptivity and semantic relevance, limiting their impact on performance improvement. In this paper, we propose \textbf{SERA}, an LLM-powered framework that enables autonomous driving systems to self-evolve by repairing failure cases through targeted scenario recommendation. By analyzing performance logs, SERA identifies failure patterns and dynamically retrieves semantically aligned scenarios from a structured bank. An LLM-based reflection mechanism further refines these recommendations to maximize relevance and diversity. The selected scenarios are used for few-shot fine-tuning, enabling targeted adaptation with minimal data. Experiments on the benchmark show that SERA consistently improves key metrics across multiple autonomous driving baselines, demonstrating its effectiveness and generalizability under safety-critical conditions.
Adversarial Driving Behavior Generation Incorporating Human Risk Cognition for Autonomous Vehicle Evaluation
Oct 14, 2023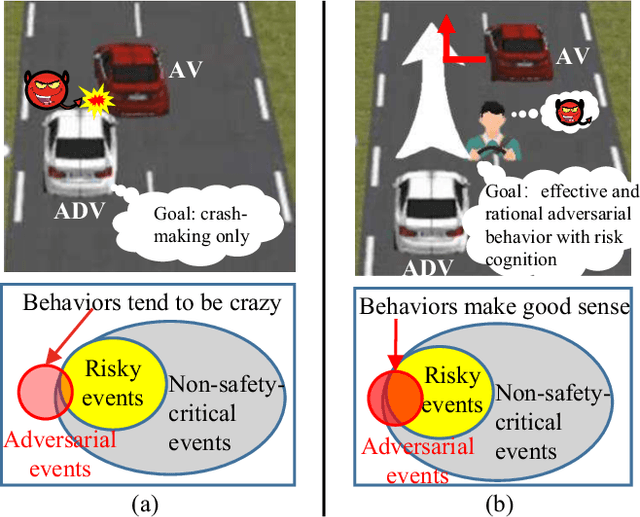

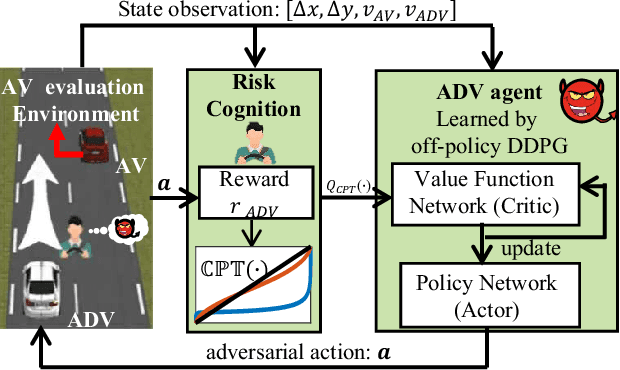
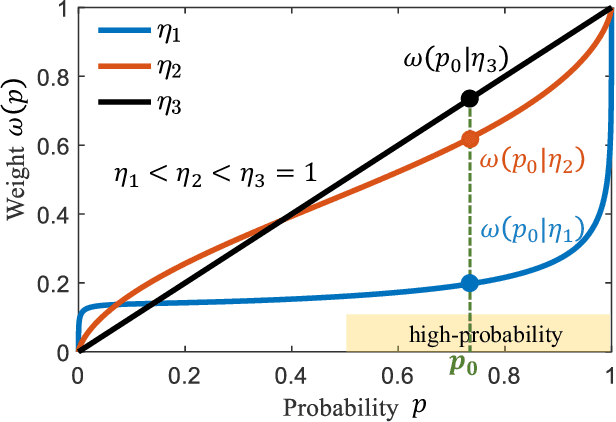
Autonomous vehicle (AV) evaluation has been the subject of increased interest in recent years both in industry and in academia. This paper focuses on the development of a novel framework for generating adversarial driving behavior of background vehicle interfering against the AV to expose effective and rational risky events. Specifically, the adversarial behavior is learned by a reinforcement learning (RL) approach incorporated with the cumulative prospect theory (CPT) which allows representation of human risk cognition. Then, the extended version of deep deterministic policy gradient (DDPG) technique is proposed for training the adversarial policy while ensuring training stability as the CPT action-value function is leveraged. A comparative case study regarding the cut-in scenario is conducted on a high fidelity Hardware-in-the-Loop (HiL) platform and the results demonstrate the adversarial effectiveness to infer the weakness of the tested AV.