Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMarkov Data-Based Reference Tracking of Tensegrity Morphing Airfoils
Oct 21, 2020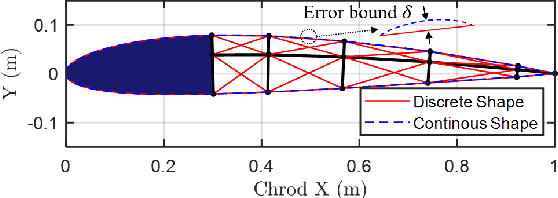
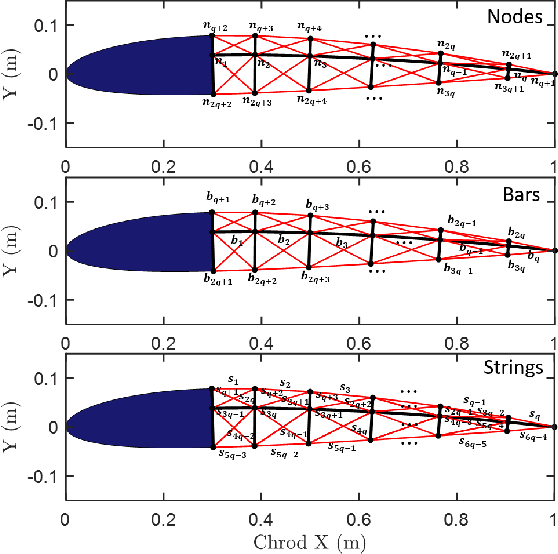
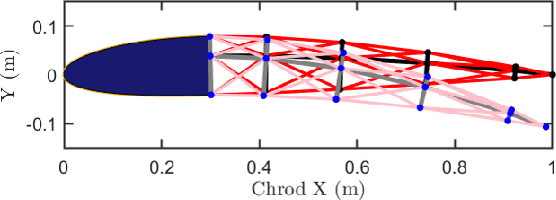
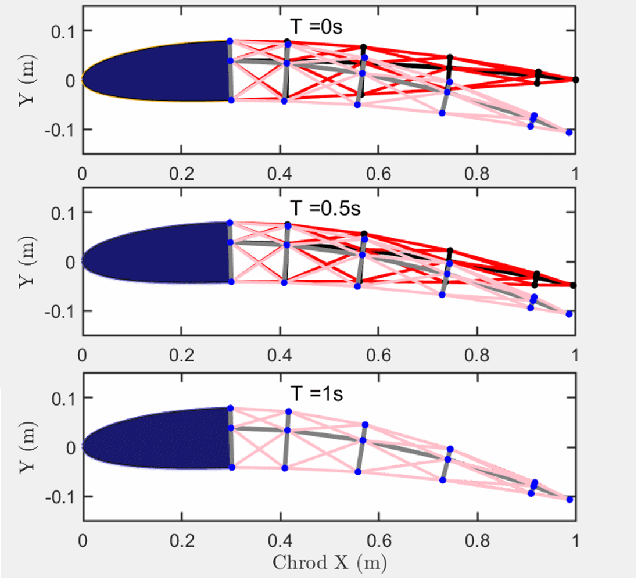
This letter presents a data-based control design for reference tracking applications. This design finds the optimal control sequence, which minimizes a quadratic cost function consisting of tracking error and input increments over a finite interval [0,N]. The only information needed is the first N+1 Markov parameters of the system. This design is employed on a tensegrity morphing airfoil whose topology has been described in detail in this letter. A NACA 2412 airfoil with specified morphing targets is chosen to verify the developed design. The principle developed in this letter is also applicable to other structural control problems.
Via