Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMarkov Data-Based Reference Tracking of Tensegrity Morphing Airfoils
Paper and Code
Oct 21, 2020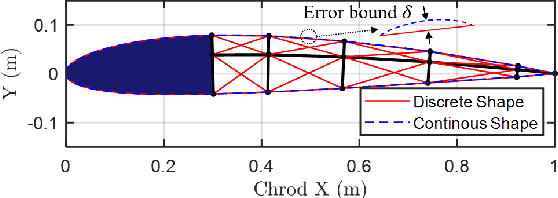
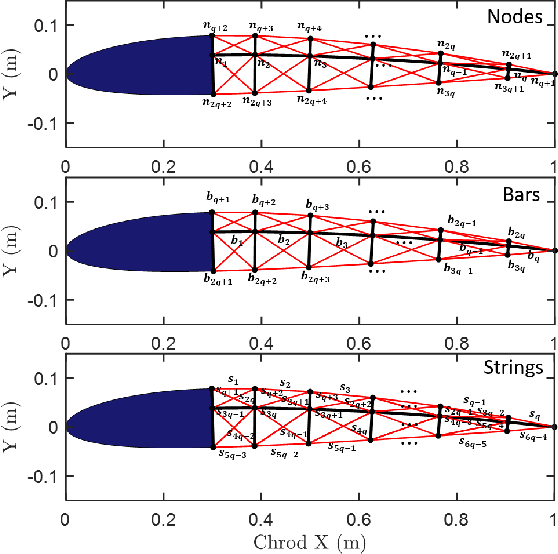
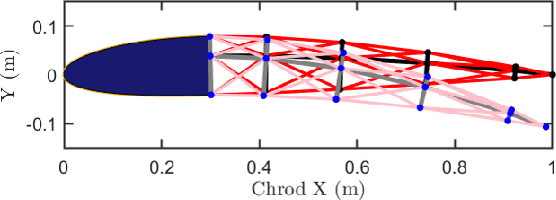
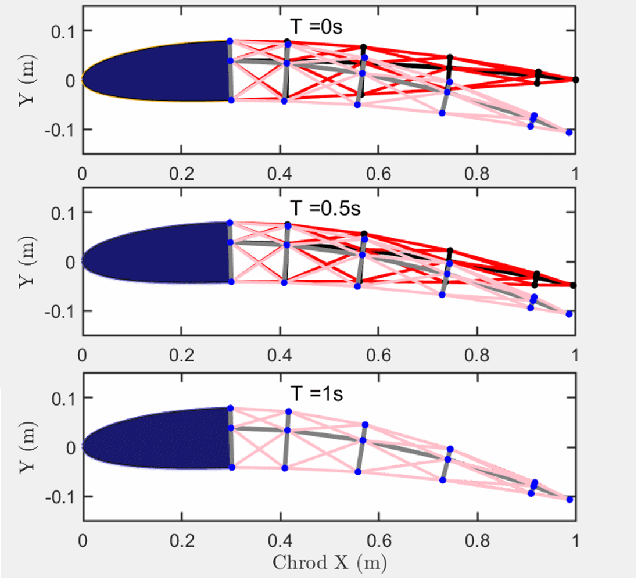
This letter presents a data-based control design for reference tracking applications. This design finds the optimal control sequence, which minimizes a quadratic cost function consisting of tracking error and input increments over a finite interval [0,N]. The only information needed is the first N+1 Markov parameters of the system. This design is employed on a tensegrity morphing airfoil whose topology has been described in detail in this letter. A NACA 2412 airfoil with specified morphing targets is chosen to verify the developed design. The principle developed in this letter is also applicable to other structural control problems.
View paper on