 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D UAV Trajectory Planning for IoT Data Collection via Matrix-Based Evolutionary Computation
Oct 08, 2024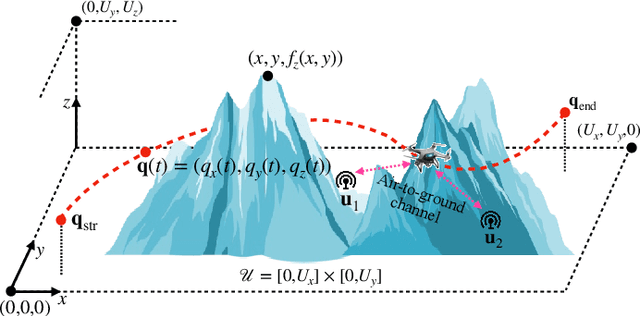
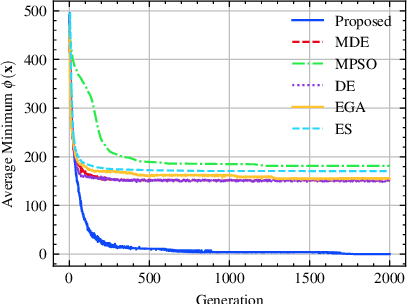
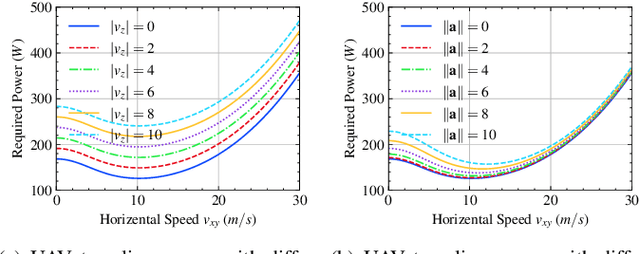
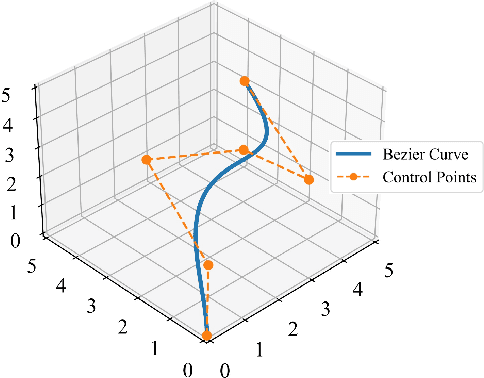
UAVs are increasingly becoming vital tools in various wireless communication applications including internet of things (IoT) and sensor networks, thanks to their rapid and agile non-terrestrial mobility. Despite recent research, planning three-dimensional (3D) UAV trajectories over a continuous temporal-spatial domain remains challenging due to the need to solve computationally intensive optimization problems. In this paper, we study UAV-assisted IoT data collection aimed at minimizing total energy consumption while accounting for the UAV's physical capabilities, the heterogeneous data demands of IoT nodes, and 3D terrain. We propose a matrix-based differential evolution with constraint handling (MDE-CH), a computation-efficient evolutionary algorithm designed to address non-convex constrained optimization problems with several different types of constraints. Numerical evaluations demonstrate that the proposed MDE-CH algorithm provides a continuous 3D temporal-spatial UAV trajectory capable of efficiently minimizing energy consumption under various practical constraints and outperforms the conventional fly-hover-fly model for both two-dimensional (2D) and 3D trajectory planning.
Hybrid Neural Coded Modulation: Design and Training Methods
Feb 04, 2022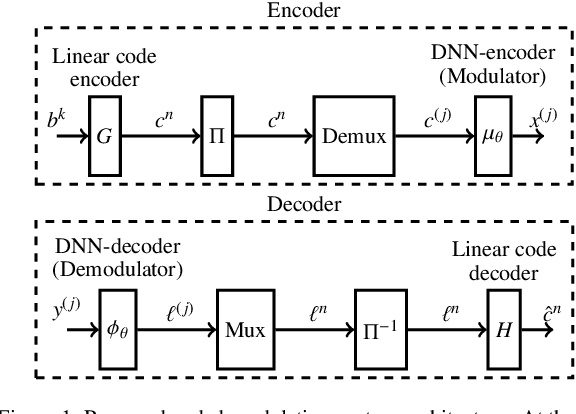
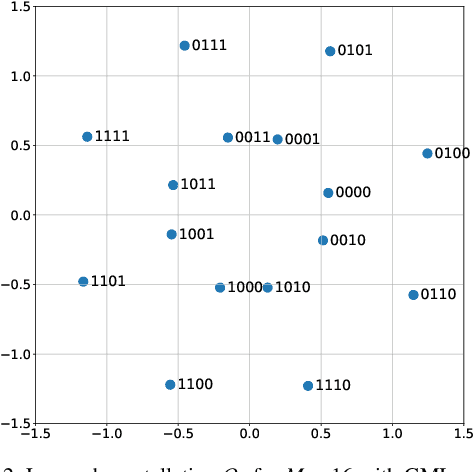
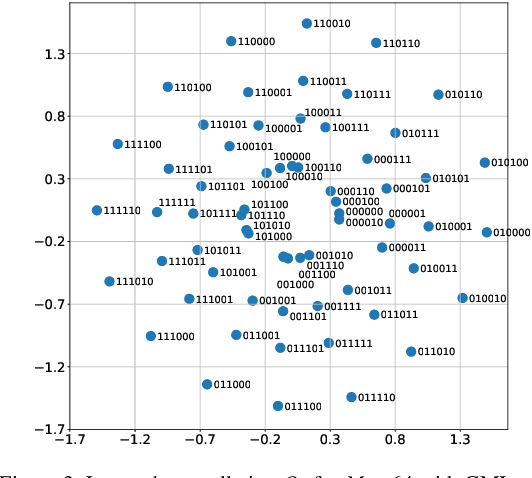
We propose a hybrid coded modulation scheme which composes of inner and outer codes. The outer-code can be any standard binary linear code with efficient soft decoding capability (e.g. low-density parity-check (LDPC) codes). The inner code is designed using a deep neural network (DNN) which takes the channel coded bits and outputs modulated symbols. For training the DNN, we propose to use a loss function that is inspired by the generalized mutual information. The resulting constellations are shown to outperform the conventional quadrature amplitude modulation (QAM) based coding scheme for modulation order 16 and 64 with 5G standard LDPC codes.