 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTactile Data Recording System for Clothing with Motion-Controlled Robotic Sliding
Nov 08, 2025The tactile sensation of clothing is critical to wearer comfort. To reveal physical properties that make clothing comfortable, systematic collection of tactile data during sliding motion is required. We propose a robotic arm-based system for collecting tactile data from intact garments. The system performs stroking measurements with a simulated fingertip while precisely controlling speed and direction, enabling creation of motion-labeled, multimodal tactile databases. Machine learning evaluation showed that including motion-related parameters improved identification accuracy for audio and acceleration data, demonstrating the efficacy of motion-related labels for characterizing clothing tactile sensation. This system provides a scalable, non-destructive method for capturing tactile data of clothing, contributing to future studies on fabric perception and reproduction.
Pinching Visuo-haptic Display: Investigating Cross-Modal Effects of Visual Textures on Electrostatic Cloth Tactile Sensations
Nov 08, 2025



This paper investigates how visual texture presentation influences tactile perception when interacting with electrostatic cloth displays. We propose a visuo-haptic system that allows users to pinch and rub virtual fabrics while feeling realistic frictional sensations modulated by electrostatic actuation. Through a user study, we examined the cross-modal effects between visual roughness and perceived tactile friction. The results demonstrate that visually rough textures amplify the perceived frictional force, even under identical electrostatic stimuli. These findings contribute to the understanding of multimodal texture perception and provide design insights for haptic feedback in virtual material interfaces.
PanoTree: Autonomous Photo-Spot Explorer in Virtual Reality Scenes
May 27, 2024
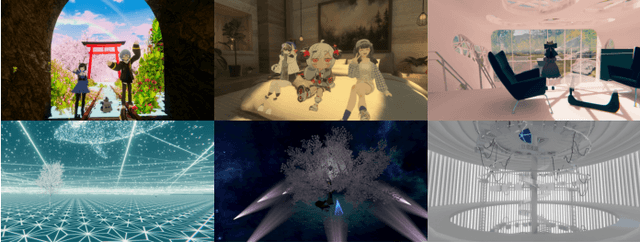

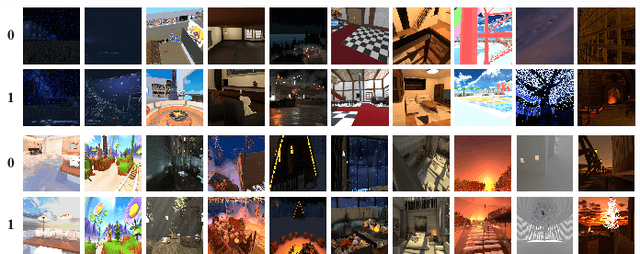
Social VR platforms enable social, economic, and creative activities by allowing users to create and share their own virtual spaces. In social VR, photography within a VR scene is an important indicator of visitors' activities. Although automatic identification of photo spots within a VR scene can facilitate the process of creating a VR scene and enhance the visitor experience, there are challenges in quantitatively evaluating photos taken in the VR scene and efficiently exploring the large VR scene. We propose PanoTree, an automated photo-spot explorer in VR scenes. To assess the aesthetics of images captured in VR scenes, a deep scoring network is trained on a large dataset of photos collected by a social VR platform to determine whether humans are likely to take similar photos. Furthermore, we propose a Hierarchical Optimistic Optimization (HOO)-based search algorithm to efficiently explore 3D VR spaces with the reward from the scoring network. Our user study shows that the scoring network achieves human-level performance in distinguishing randomly taken images from those taken by humans. In addition, we show applications using the explored photo spots, such as automatic thumbnail generation, support for VR world creation, and visitor flow planning within a VR scene.
Telextiles: End-to-end Remote Transmission of Fabric Tactile Sensation
May 06, 2024The tactile sensation of textiles is critical in determining the comfort of clothing. For remote use, such as online shopping, users cannot physically touch the textile of clothes, making it difficult to evaluate its tactile sensation. Tactile sensing and actuation devices are required to transmit the tactile sensation of textiles. The sensing device needs to recognize different garments, even with hand-held sensors. In addition, the existing actuation device can only present a limited number of known patterns and cannot transmit unknown tactile sensations of textiles. To address these issues, we propose Telextiles, an interface that can remotely transmit tactile sensations of textiles by creating a latent space that reflects the proximity of textiles through contrastive self-supervised learning. We confirm that textiles with similar tactile features are located close to each other in the latent space through a two-dimensional plot. We then compress the latent features for known textile samples into the 1D distance and apply the 16 textile samples to the rollers in the order of the distance. The roller is rotated to select the textile with the closest feature if an unknown textile is detected.
* 10 pages, 8 figures, Proceedings of the 36th Annual ACM Symposium on User Interface Software and Technology