 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePacket Header Recognition Utilizing an All-Optical Reservoir Based on Reinforcement-Learning-Optimized Double-Ring Resonator
Aug 26, 2023



Optical packet header recognition is an important signal processing task of optical communication networks. In this work, we propose an all-optical reservoir, consisting of integrated double-ring resonators (DRRs) as nodes, for fast and accurate optical packet header recognition. As the delay-bandwidth product (DBP) of the node is a key figure-of-merit in the reservoir, we adopt a deep reinforcement learning algorithm to maximize the DBPs for various types of DRRs, which has the advantage of full parameter space optimization and fast convergence speed. Intriguingly, the optimized DBPs of the DRRs in cascaded, parallel, and embedded configurations reach the same maximum value, which is believed to be the global maximum. Finally, 3-bit and 6-bit packet header recognition tasks are performed with the all-optical reservoir consisting of the optimized cascaded rings, which have greatly reduced chip size and the desired "flat-top" delay spectra. Using this optical computing scheme, word-error rates as low as 5*10-4 and 9*10-4 are achieved for 3-bit and 6-bit packet header recognition tasks, respectively, which are one order of magnitude better than the previously reported values.
Deformation Control of a Deformable Object Based on Visual and Tactile Feedback
May 30, 2021
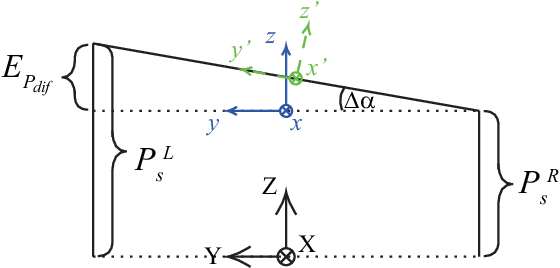

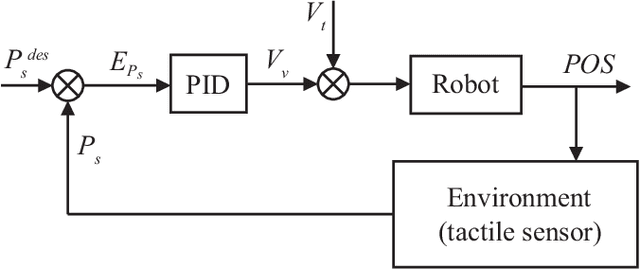
In this paper, we presented a new method for deformation control of deformable objects, which utilizes both visual and tactile feedback. At present, manipulation of deformable objects is basically formulated by assuming positional constraints. But in fact, in many situations manipulation has to be performed under actively applied force constraints. This scenario is considered in this research. In the proposed scheme a tactile feedback is integrated to ensure a stable contact between the robot end-effector and the soft object to be manipulated. The controlled contact force is also utilized to regulate the deformation of the soft object with its shape measured by a vision sensor. The effectiveness of the proposed method is demonstrated by a book page turning and shaping experiment.