 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdvancing Autonomous Emergency Response Systems: A Generative AI Perspective
Nov 12, 2025
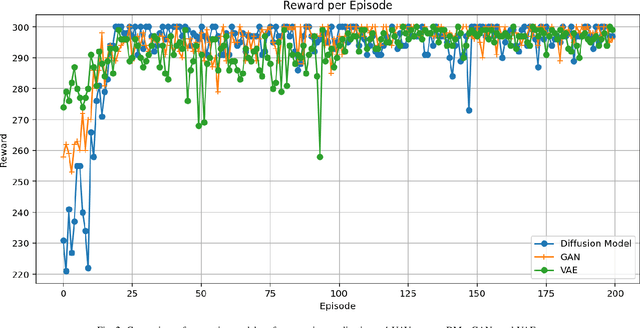


Autonomous Vehicles (AVs) are poised to revolutionize emergency services by enabling faster, safer, and more efficient responses. This transformation is driven by advances in Artificial Intelligence (AI), particularly Reinforcement Learning (RL), which allows AVs to navigate complex environments and make critical decisions in real time. However, conventional RL paradigms often suffer from poor sample efficiency and lack adaptability in dynamic emergency scenarios. This paper reviews next-generation AV optimization strategies to address these limitations. We analyze the shift from conventional RL to Diffusion Model (DM)-augmented RL, which enhances policy robustness through synthetic data generation, albeit with increased computational cost. Additionally, we explore the emerging paradigm of Large Language Model (LLM)-assisted In-Context Learning (ICL), which offers a lightweight and interpretable alternative by enabling rapid, on-the-fly adaptation without retraining. By reviewing the state of the art in AV intelligence, DM-augmented RL, and LLM-assisted ICL, this paper provides a critical framework for understanding the next generation of autonomous emergency response systems from a Generative AI perspective.
LLM-Enabled In-Context Learning for Data Collection Scheduling in UAV-assisted Sensor Networks
Apr 20, 2025Unmanned Aerial Vehicles (UAVs) are increasingly being used in various private and commercial applications, e.g. traffic control, package delivery, and Search and Rescue (SAR) operations. Machine Learning (ML) methods used in UAV-assisted Sensor Networks (UASNETs) and especially in Deep Reinforcement Learning (DRL) face challenges such as complex and lengthy model training, gaps between simulation and reality, and low sample efficiency, which conflict with the urgency of emergencies such as SAR operations. This paper proposes In-Context Learning (ICL)-based Data Collection Scheduling (ICLDC) scheme, as an alternative to DRL in emergencies. The UAV collects and transmits logged sensory data, to an LLM, to generate a task description in natural language, from which it obtains a data collection schedule to be executed by the UAV. The system continuously adapts by adding feedback to task descriptions and utilizing feedback for future decisions. This method is tested against jailbreaking attacks, where task description is manipulated to undermine network performance, highlighting the vulnerability of LLMs to such attacks. The proposed ICLDC outperforms the Maximum Channel Gain by reducing cumulative packet loss by approximately 56\%. ICLDC presents a promising direction for intelligent scheduling and control in UAV-assisted data collection.
Diffusion Models for Smarter UAVs: Decision-Making and Modeling
Jan 10, 2025Unmanned Aerial Vehicles (UAVs) are increasingly adopted in modern communication networks. However, challenges in decision-making and digital modeling continue to impede their rapid advancement. Reinforcement Learning (RL) algorithms face limitations such as low sample efficiency and limited data versatility, further magnified in UAV communication scenarios. Moreover, Digital Twin (DT) modeling introduces substantial decision-making and data management complexities. RL models, often integrated into DT frameworks, require extensive training data to achieve accurate predictions. In contrast to traditional approaches that focus on class boundaries, Diffusion Models (DMs), a new class of generative AI, learn the underlying probability distribution from the training data and can generate trustworthy new patterns based on this learned distribution. This paper explores the integration of DMs with RL and DT to effectively address these challenges. By combining the data generation capabilities of DMs with the decision-making framework of RL and the modeling accuracy of DT, the integration improves the adaptability and real-time performance of UAV communication. Moreover, the study shows how DMs can alleviate data scarcity, improve policy networks, and optimize dynamic modeling, providing a robust solution for complex UAV communication scenarios.
Human-In-The-Loop Machine Learning for Safe and Ethical Autonomous Vehicles: Principles, Challenges, and Opportunities
Aug 22, 2024



Rapid advances in Machine Learning (ML) have triggered new trends in Autonomous Vehicles (AVs). ML algorithms play a crucial role in interpreting sensor data, predicting potential hazards, and optimizing navigation strategies. However, achieving full autonomy in cluttered and complex situations, such as intricate intersections, diverse sceneries, varied trajectories, and complex missions, is still challenging, and the cost of data labeling remains a significant bottleneck. The adaptability and robustness of humans in complex scenarios motivate the inclusion of humans in ML process, leveraging their creativity, ethical power, and emotional intelligence to improve ML effectiveness. The scientific community knows this approach as Human-In-The-Loop Machine Learning (HITL-ML). Towards safe and ethical autonomy, we present a review of HITL-ML for AVs, focusing on Curriculum Learning (CL), Human-In-The-Loop Reinforcement Learning (HITL-RL), Active Learning (AL), and ethical principles. In CL, human experts systematically train ML models by starting with simple tasks and gradually progressing to more difficult ones. HITL-RL significantly enhances the RL process by incorporating human input through techniques like reward shaping, action injection, and interactive learning. AL streamlines the annotation process by targeting specific instances that need to be labeled with human oversight, reducing the overall time and cost associated with training. Ethical principles must be embedded in AVs to align their behavior with societal values and norms. In addition, we provide insights and specify future research directions.
On the Use of Immersive Digital Technologies for Designing and Operating UAVs
Jul 23, 2024Unmanned Aerial Vehicles (UAVs) provide agile and safe solutions to communication relay networks, offering improved throughput. However, their modeling and control present challenges, and real-world deployment is hindered by the gap between simulation and reality. Moreover, enhancing situational awareness is critical. Several works in the literature proposed integrating UAV operation with immersive digital technologies, such as Digital Twin (DT) and Extended Reality (XR), to address these challenges. This paper provides a comprehensive overview of current research and developments involving immersive digital technologies for UAVs, including the latest advancements and emerging trends. We also explore the integration of DT and XR with Artificial Intelligence (AI) algorithms to create more intelligent, adaptive, and responsive UAV systems. Finally, we provide discussions, identify gaps in current research, and suggest future directions for studying the application of immersive technologies in UAVs, fostering further innovation and development in this field. We envision the fusion of DTs with XR will transform how UAVs operate, offering tools that enhance visualization, improve decision-making, and enable effective collaboration.
Deep Reinforcement Learning for Joint Cruise Control and Intelligent Data Acquisition in UAVs-Assisted Sensor Networks
Dec 15, 2023Unmanned aerial vehicle (UAV)-assisted sensor networks (UASNets), which play a crucial role in creating new opportunities, are experiencing significant growth in civil applications worldwide. UASNets improve disaster management through timely surveillance and advance precision agriculture with detailed crop monitoring, thereby significantly transforming the commercial economy. UASNets revolutionize the commercial sector by offering greater efficiency, safety, and cost-effectiveness, highlighting their transformative impact. A fundamental aspect of these new capabilities and changes is the collection of data from rugged and remote areas. Due to their excellent mobility and maneuverability, UAVs are employed to collect data from ground sensors in harsh environments, such as natural disaster monitoring, border surveillance, and emergency response monitoring. One major challenge in these scenarios is that the movements of UAVs affect channel conditions and result in packet loss. Fast movements of UAVs lead to poor channel conditions and rapid signal degradation, resulting in packet loss. On the other hand, slow mobility of a UAV can cause buffer overflows of the ground sensors, as newly arrived data is not promptly collected by the UAV. Our proposal to address this challenge is to minimize packet loss by jointly optimizing the velocity controls and data collection schedules of multiple UAVs.Furthermore, in UASNets, swift movements of UAVs result in poor channel conditions and fast signal attenuation, leading to an extended age of information (AoI). In contrast, slow movements of UAVs prolong flight time, thereby extending the AoI of ground sensors.To address this challenge, we propose a new mean-field flight resource allocation optimization to minimize the AoI of sensory data.