 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Memorization and Privacy risks of Sharpness Aware Minimization
Sep 30, 2023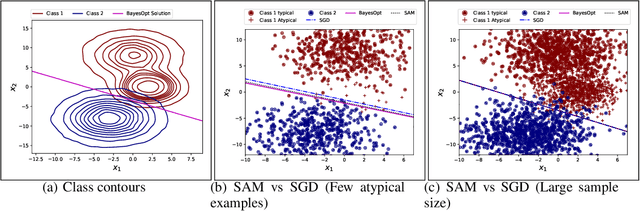
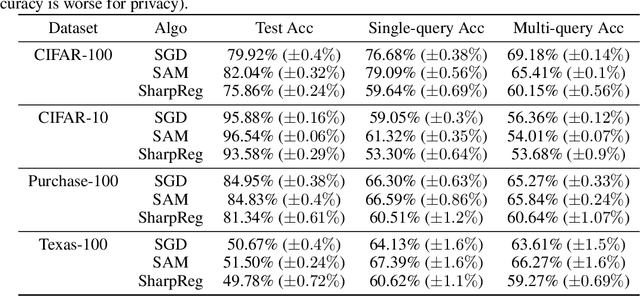
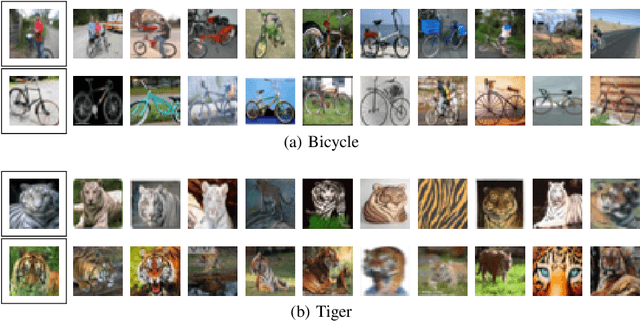
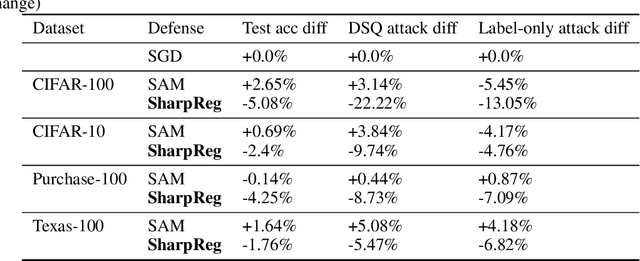
In many recent works, there is an increased focus on designing algorithms that seek flatter optima for neural network loss optimization as there is empirical evidence that it leads to better generalization performance in many datasets. In this work, we dissect these performance gains through the lens of data memorization in overparameterized models. We define a new metric that helps us identify which data points specifically do algorithms seeking flatter optima do better when compared to vanilla SGD. We find that the generalization gains achieved by Sharpness Aware Minimization (SAM) are particularly pronounced for atypical data points, which necessitate memorization. This insight helps us unearth higher privacy risks associated with SAM, which we verify through exhaustive empirical evaluations. Finally, we propose mitigation strategies to achieve a more desirable accuracy vs privacy tradeoff.
Deep reinforcement learning for guidewire navigation in coronary artery phantom
Oct 05, 2021

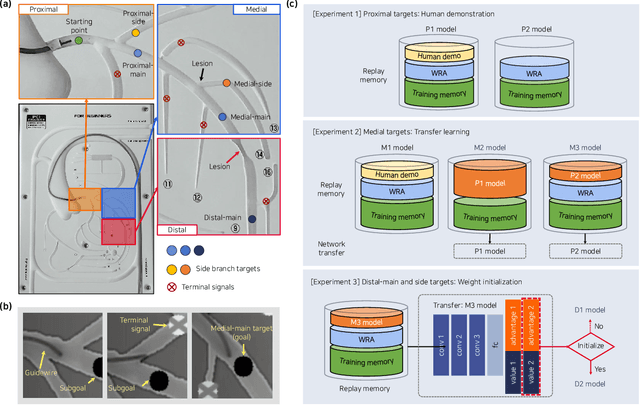

In percutaneous intervention for treatment of coronary plaques, guidewire navigation is a primary procedure for stent delivery. Steering a flexible guidewire within coronary arteries requires considerable training, and the non-linearity between the control operation and the movement of the guidewire makes precise manipulation difficult. Here, we introduce a deep reinforcement learning(RL) framework for autonomous guidewire navigation in a robot-assisted coronary intervention. Using Rainbow, a segment-wise learning approach is applied to determine how best to accelerate training using human demonstrations with deep Q-learning from demonstrations (DQfD), transfer learning, and weight initialization. `State' for RL is customized as a focus window near the guidewire tip, and subgoals are placed to mitigate a sparse reward problem. The RL agent improves performance, eventually enabling the guidewire to reach all valid targets in `stable' phase. Our framework opens anew direction in the automation of robot-assisted intervention, providing guidance on RL in physical spaces involving mechanical fatigue.