 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Bidirectional Translation between Descriptions and Actions with Small Paired Data
Mar 08, 2022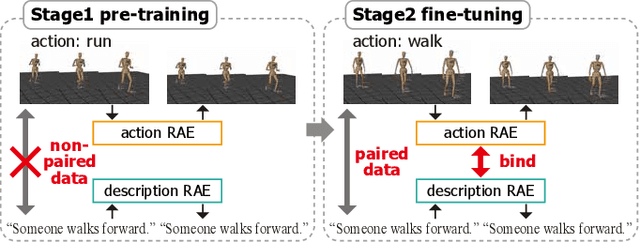
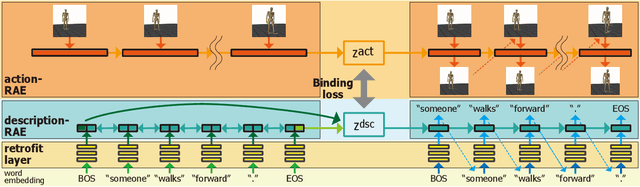
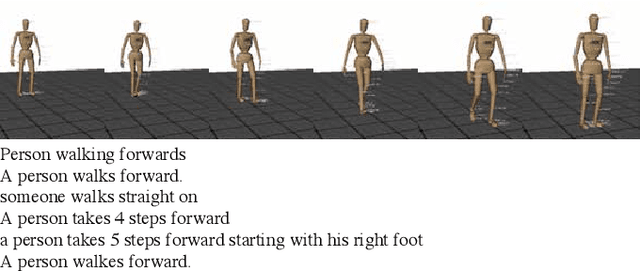
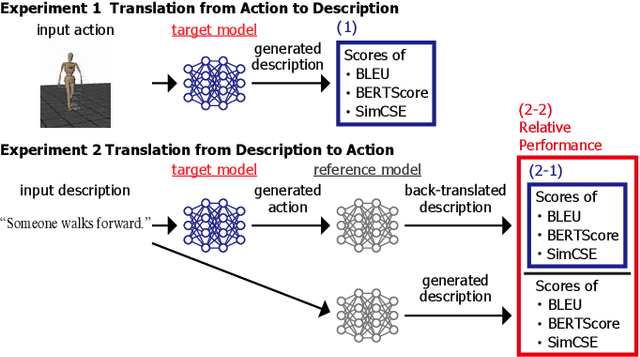
This study achieved bidirectional translation between descriptions and actions using small paired data. The ability to mutually generate descriptions and actions is essential for robots to collaborate with humans in their daily lives. The robot is required to associate real-world objects with linguistic expressions, and large-scale paired data are required for machine learning approaches. However, a paired dataset is expensive to construct and difficult to collect. This study proposes a two-stage training method for bidirectional translation. In the proposed method, we train recurrent autoencoders (RAEs) for descriptions and actions with a large amount of non-paired data. Then, we fine-tune the entire model to bind their intermediate representations using small paired data. Because the data used for pre-training do not require pairing, behavior-only data or a large language corpus can be used. We experimentally evaluated our method using a paired dataset consisting of motion-captured actions and descriptions. The results showed that our method performed well, even when the amount of paired data to train was small. The visualization of the intermediate representations of each RAE showed that similar actions were encoded in a clustered position and the corresponding feature vectors well aligned.
Embodying Pre-Trained Word Embeddings Through Robot Actions
Apr 17, 2021
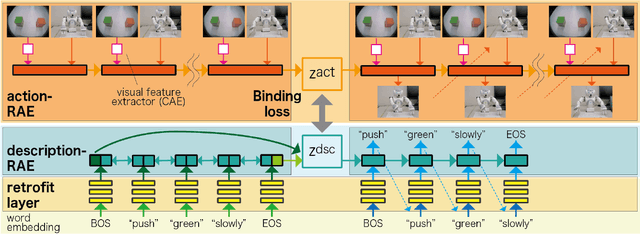
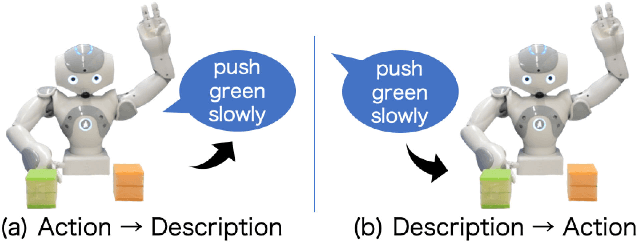
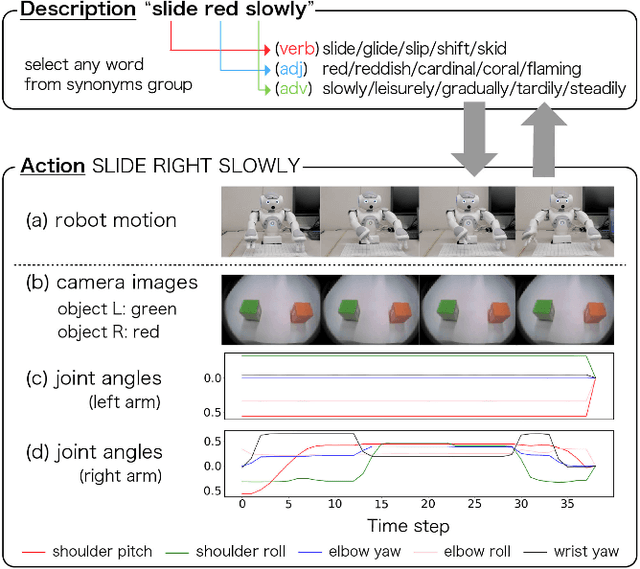
We propose a promising neural network model with which to acquire a grounded representation of robot actions and the linguistic descriptions thereof. Properly responding to various linguistic expressions, including polysemous words, is an important ability for robots that interact with people via linguistic dialogue. Previous studies have shown that robots can use words that are not included in the action-description paired datasets by using pre-trained word embeddings. However, the word embeddings trained under the distributional hypothesis are not grounded, as they are derived purely from a text corpus. In this letter, we transform the pre-trained word embeddings to embodied ones by using the robot's sensory-motor experiences. We extend a bidirectional translation model for actions and descriptions by incorporating non-linear layers that retrofit the word embeddings. By training the retrofit layer and the bidirectional translation model alternately, our proposed model is able to transform the pre-trained word embeddings to adapt to a paired action-description dataset. Our results demonstrate that the embeddings of synonyms form a semantic cluster by reflecting the experiences (actions and environments) of a robot. These embeddings allow the robot to properly generate actions from unseen words that are not paired with actions in a dataset.
* To appear in IEEE Robotics and Automation Letters (RA-L) and IEEE International Conference on Robotics and Automation (ICRA 2021)