 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Preliminary Research on Space Situational Awareness Based on Event Cameras
Mar 25, 2022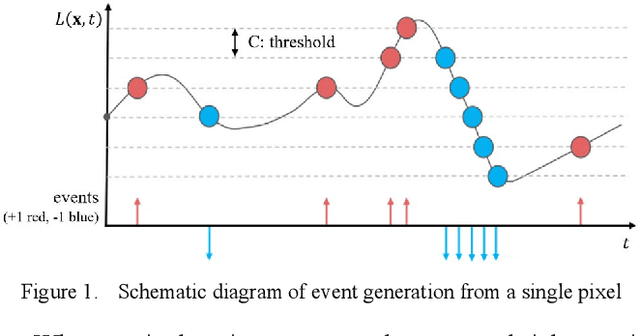
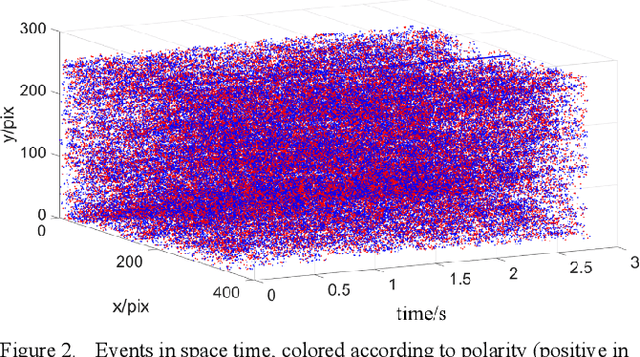
Event camera is a new type of sensor that is different from traditional cameras. Each pixel is triggered asynchronously by an event. The trigger event is the change of the brightness irradiated on the pixel. If the increment or decrement is higher than a certain threshold, the event is output. Compared with traditional cameras, event cameras have the advantages of high temporal resolution, low latency, high dynamic range, low bandwidth and low power consumption. We carried out a series of observation experiments in a simulated space lighting environment. The experimental results show that the event camera can give full play to the above advantages in space situational awareness. This article first introduces the basic principles of the event camera, then analyzes its advantages and disadvantages, then introduces the observation experiment and analyzes the experimental results, and finally, a workflow of space situational awareness based on event cameras is given.
Event-Based Dense Reconstruction Pipeline
Mar 23, 2022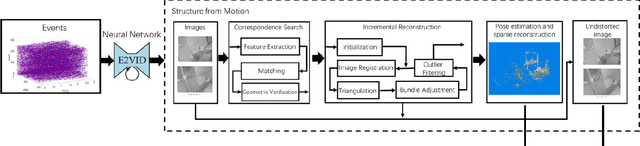
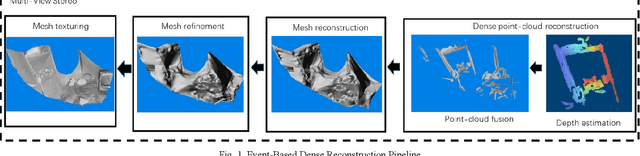

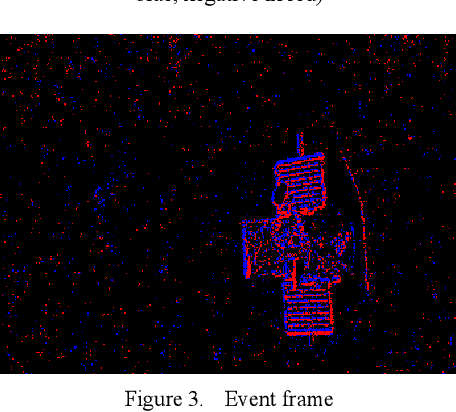
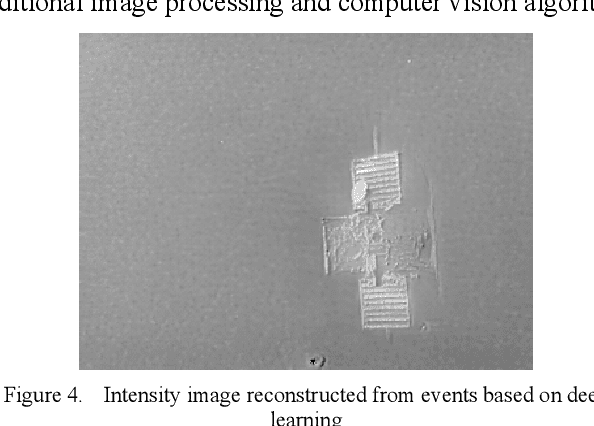
Event cameras are a new type of sensors that are different from traditional cameras. Each pixel is triggered asynchronously by event. The trigger event is the change of the brightness irradiated on the pixel. If the increment or decrement of brightness is higher than a certain threshold, an event is output. Compared with traditional cameras, event cameras have the advantages of high dynamic range and no motion blur. Since events are caused by the apparent motion of intensity edges, the majority of 3D reconstructed maps consist only of scene edges, i.e., semi-dense maps, which is not enough for some applications. In this paper, we propose a pipeline to realize event-based dense reconstruction. First, deep learning is used to reconstruct intensity images from events. And then, structure from motion (SfM) is used to estimate camera intrinsic, extrinsic and sparse point cloud. Finally, multi-view stereo (MVS) is used to complete dense reconstruction.
Research on Event Accumulator Settings for Event-Based SLAM
Dec 01, 2021
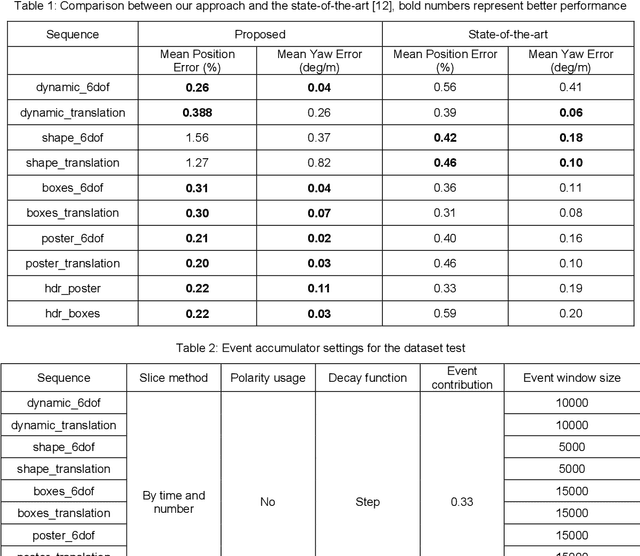
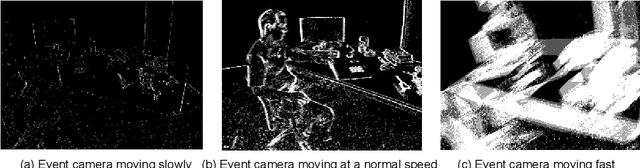
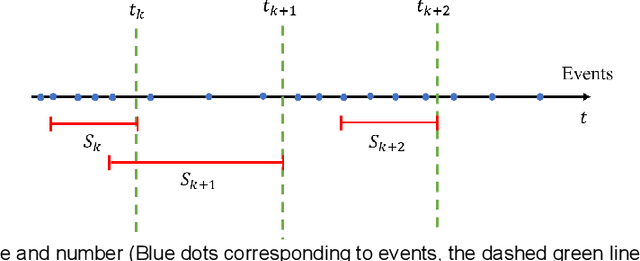
Event cameras are a new type of sensors that are different from traditional cameras. Each pixel is triggered asynchronously by event. The trigger event is the change of the brightness irradiated on the pixel. If the increment or decrement of brightness is higher than a certain threshold, an event is output. Compared with traditional cameras, event cameras have the advantages of high dynamic range and no motion blur. Accumulating events to frames and using traditional SLAM algorithm is a direct and efficient way for event-based SLAM. Different event accumulator settings, such as slice method of event stream, processing method for no motion, using polarity or not, decay function and event contribution, can cause quite different accumulating results. We conducted the research on how to accumulate event frames to achieve a better event-based SLAM performance. For experiment verification, accumulated event frames are fed to the traditional SLAM system to construct an event-based SLAM system. Our strategy of setting event accumulator has been evaluated on the public dataset. The experiment results show that our method can achieve better performance in most sequences compared with the state-of-the-art event frame based SLAM algorithm. In addition, the proposed approach has been tested on a quadrotor UAV to show the potential of applications in real scenario. Code and results are open sourced to benefit the research community of event cameras