 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePRBench: End-to-end Paper Reproduction in Physics Research
Mar 29, 2026AI agents powered by large language models exhibit strong reasoning and problem-solving capabilities, enabling them to assist scientific research tasks such as formula derivation and code generation. However, whether these agents can reliably perform end-to-end reproduction from real scientific papers remains an open question. We introduce PRBench, a benchmark of 30 expert-curated tasks spanning 11 subfields of physics. Each task requires an agent to comprehend the methodology of a published paper, implement the corresponding algorithms from scratch, and produce quantitative results matching the original publication. Agents are provided only with the task instruction and paper content, and operate in a sandboxed execution environment. All tasks are contributed by domain experts from over 20 research groups at the School of Physics, Peking University, each grounded in a real published paper and validated through end-to-end reproduction with verified ground-truth results and detailed scoring rubrics. Using an agentified assessment pipeline, we evaluate a set of coding agents on PRBench and analyze their capabilities across key dimensions of scientific reasoning and execution. The best-performing agent, OpenAI Codex powered by GPT-5.3-Codex, achieves a mean overall score of 34%. All agents exhibit a zero end-to-end callback success rate, with particularly poor performance in data accuracy and code correctness. We further identify systematic failure modes, including errors in formula implementation, inability to debug numerical simulations, and fabrication of output data. Overall, PRBench provides a rigorous benchmark for evaluating progress toward autonomous scientific research.
Joint Training Scattering Matrix Learning and Channel Estimation for Beyond-Diagonal Reconfigurable Intelligent Surfaces
Mar 26, 2026Beyond-diagonal reconfigurable intelligent surface (BD-RIS) generalizes the conventional diagonal RIS (D-RIS) by introducing tunable inter-element connections, offering enhanced wave manipulation capabilities. However, realizing the advantages of BD-RIS requires accurate channel state information (CSI), whose acquisition becomes significantly more challenging due to the increased number of channel coefficients, leading to prohibitively large pilot training overhead in BD-RIS-aided multi-user multiple-input multiple-output (MU-MIMO) systems. Existing studies reduce pilot overhead by exploiting the channel correlations induced by the Kronecker-product or multi-linear structure of BD-RIS-aided channels, which neglect the spatial correlation among antennas and the statistical correlation across RIS-user channels. In this paper, we propose a learning-based channel estimation framework, namely the joint training scattering matrix learning and channel estimation framework (JTSMLCEF), which jointly optimizes the BD-RIS training scattering matrix and estimates the cascaded channels in an end-to-end manner to achieve accurate channel estimation and reduce the pilot overhead. The proposed JTSMLCEF follows a two-phase channel estimation protocol to enable adaptive training scattering matrix optimization with a training scattering matrix optimizer (TSMO) and cascaded channel estimation with a dual-attention channel estimator (DACE). Specifically, the DACE is designed with intra-user and inter-user attention modules to capture the multi-dimensional correlations in multi-user cascaded channels. Simulation results demonstrate the superiority of JTSMLCEF. Compared with the current state-of-the-art method, it reduces the pilot overhead by $80\%$ while further reducing the normalized mean squared error (NMSE) by $82.6\%$ and $92.5\%$ in indoor and urban micro-cell (UMi) scenarios, respectively.
From Sequential to Recursive: Enhancing Decision-Focused Learning with Bidirectional Feedback
Nov 11, 2025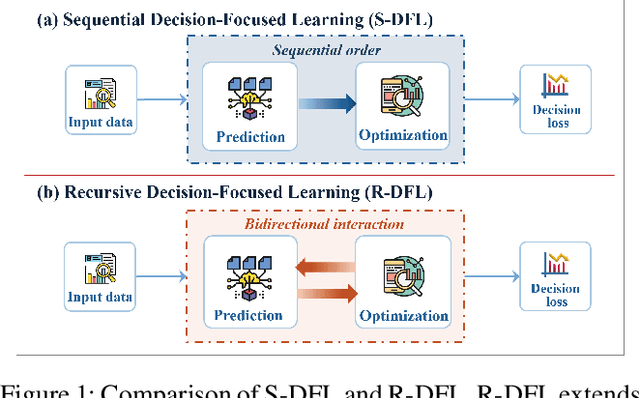
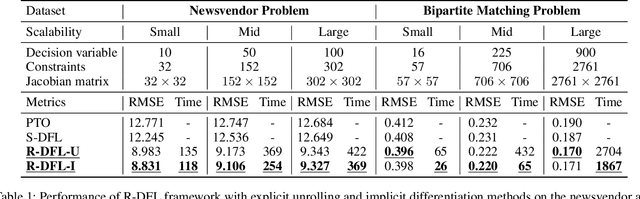
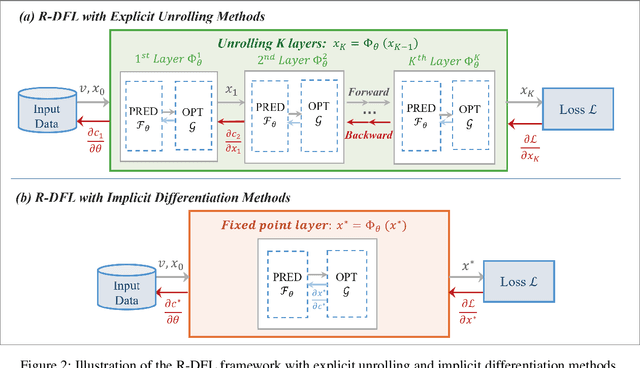
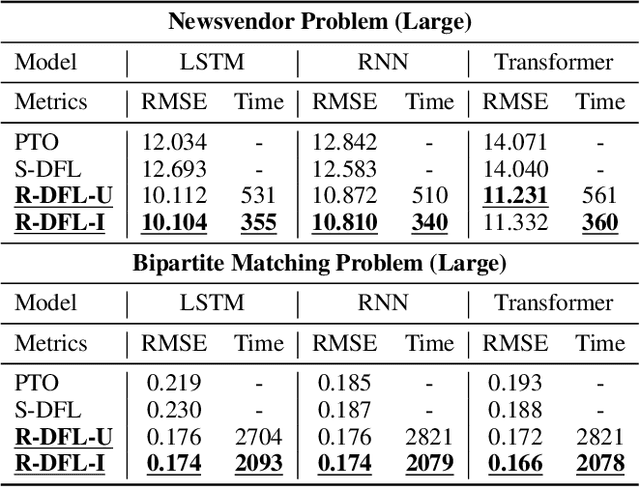
Decision-focused learning (DFL) has emerged as a powerful end-to-end alternative to conventional predict-then-optimize (PTO) pipelines by directly optimizing predictive models through downstream decision losses. Existing DFL frameworks are limited by their strictly sequential structure, referred to as sequential DFL (S-DFL). However, S-DFL fails to capture the bidirectional feedback between prediction and optimization in complex interaction scenarios. In view of this, we first time propose recursive decision-focused learning (R-DFL), a novel framework that introduces bidirectional feedback between downstream optimization and upstream prediction. We further extend two distinct differentiation methods: explicit unrolling via automatic differentiation and implicit differentiation based on fixed-point methods, to facilitate efficient gradient propagation in R-DFL. We rigorously prove that both methods achieve comparable gradient accuracy, with the implicit method offering superior computational efficiency. Extensive experiments on both synthetic and real-world datasets, including the newsvendor problem and the bipartite matching problem, demonstrate that R-DFL not only substantially enhances the final decision quality over sequential baselines but also exhibits robust adaptability across diverse scenarios in closed-loop decision-making problems.
Lossy Beyond Diagonal Reconfigurable Intelligent Surfaces: Modeling and Optimization
Apr 28, 2025



Beyond diagonal reconfigurable intelligent surface (BD-RIS) has emerged as an advancement and generalization of the conventional diagonal RIS (D-RIS) by introducing tunable interconnections between RIS elements, enabling smarter wave manipulation and enlarged coverage. While BD-RIS has demonstrated advantages over D-RIS in various aspects, most existing works rely on the assumption of a lossless model, leaving practical considerations unaddressed. This paper thus proposes a lossy BD-RIS model and develops corresponding optimization algorithms for various BD-RIS-aided communication systems. First, by leveraging admittance parameter analysis, we model each tunable admittance based on a lumped circuit with losses and derive an expression of a circle characterizing the real and imaginary parts of each tunable admittance. We then consider the received signal power maximization in single-user single-input single-output (SISO) systems with the proposed lossy BD-RIS model. To solve the optimization problem, we design an effective algorithm by carefully exploiting the problem structure. Specifically, an alternating direction method of multipliers (ADMM) framework is custom-designed to deal with the complicated constraints associated with lossy BD-RIS. Furthermore, we extend the proposed algorithmic framework to more general multiuser multiple-input single-output (MU-MISO) systems, where the transmit precoder and BD-RIS scattering matrix are jointly designed to maximize the sum-rate of the system. Finally, simulation results demonstrate that all BD-RIS architectures still outperform D-RIS in the presence of losses, but the optimal BD-RIS architectures in the lossless case are not necessarily optimal in the lossy case, e.g. group-connected BD-RIS can outperform fully- and tree-connected BD-RISs in SISO systems with relatively high losses, whereas the opposite always holds true in the lossless case.
An End-to-End Smart Predict-then-Optimize Framework for Vehicle Relocation Problems in Large-Scale Vehicle Crowd Sensing
Nov 27, 2024



Ubiquitous mobile devices have catalyzed the development of vehicle crowd sensing (VCS). In particular, vehicle sensing systems show great potential in the flexible acquisition of spatio-temporal urban data through built-in sensors under diverse sensing scenarios. However, vehicle systems often exhibit biased coverage due to the heterogeneous nature of trip requests and routes. To achieve a high sensing coverage, a critical challenge lies in optimally relocating vehicles to minimize the divergence between vehicle distributions and target sensing distributions. Conventional approaches typically employ a two-stage predict-then-optimize (PTO) process: first predicting real-time vehicle distributions and subsequently generating an optimal relocation strategy based on the predictions. However, this approach can lead to suboptimal decision-making due to the propagation of errors from upstream prediction. To this end, we develop an end-to-end Smart Predict-then-Optimize (SPO) framework by integrating optimization into prediction within the deep learning architecture, and the entire framework is trained by minimizing the task-specific matching divergence rather than the upstream prediction error. Methodologically, we formulate the vehicle relocation problem by quadratic programming (QP) and incorporate a novel unrolling approach based on the Alternating Direction Method of Multipliers (ADMM) within the SPO framework to compute gradients of the QP layer, facilitating backpropagation and gradient-based optimization for end-to-end learning. The effectiveness of the proposed framework is validated by real-world taxi datasets in Hong Kong. Utilizing the alternating differentiation method, the general SPO framework presents a novel concept of addressing decision-making problems with uncertainty, demonstrating significant potential for advancing applications in intelligent transportation systems.