 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEGFN: Efficient Geometry Feature Network for Fast Stereo 3D Object Detection
Nov 28, 2021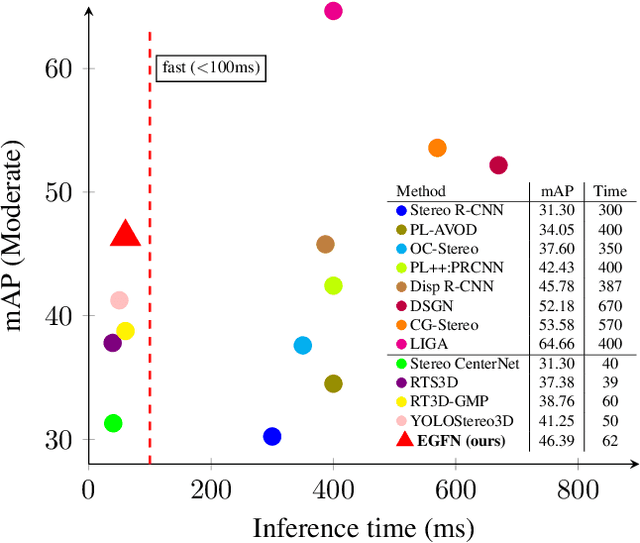
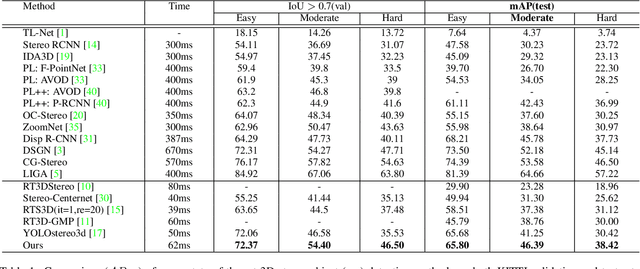
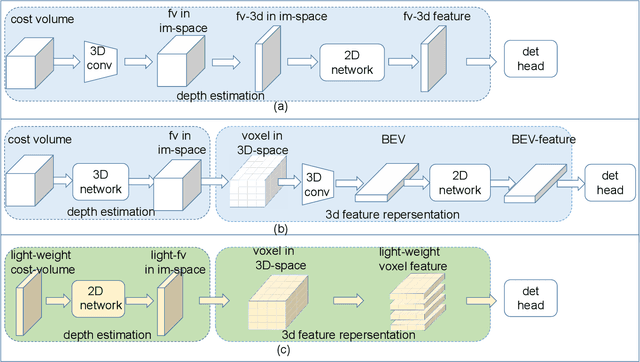
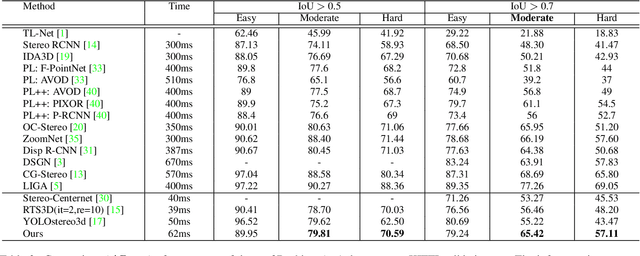
Fast stereo based 3D object detectors have made great progress in the sense of inference time recently. However, they lag far behind high-precision oriented methods in accuracy. We argue that the main reason is the missing or poor 3D geometry feature representation in fast stereo based methods. To solve this problem, we propose an efficient geometry feature generation network (EGFN). The key of our EGFN is an efficient and effective 3D geometry feature representation (EGFR) module. In the EGFR module, light-weight cost volume features are firstly generated, then are efficiently converted into 3D space, and finally multi-scale features enhancement in in both image and 3D spaces is conducted to obtain the 3D geometry features: enhanced light-weight voxel features. In addition, we introduce a novel multi-scale knowledge distillation strategy to guide multi-scale 3D geometry features learning. Experimental results on the public KITTI test set shows that the proposed EGFN outperforms YOLOStsereo3D, the advanced fast method, by 5.16\% on mAP$_{3d}$ at the cost of merely additional 12 ms and hence achieves a better trade-off between accuracy and efficiency for stereo 3D object detection. Our code will be publicly available.