 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGrasp Like Humans: Learning Generalizable Multi-Fingered Grasping from Human Proprioceptive Sensorimotor Integration
Sep 10, 2025

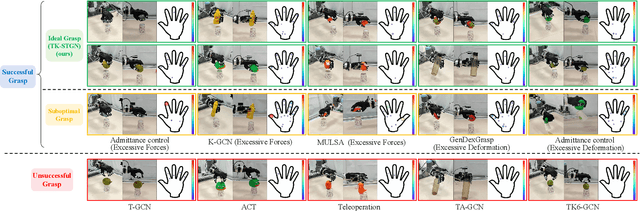

Tactile and kinesthetic perceptions are crucial for human dexterous manipulation, enabling reliable grasping of objects via proprioceptive sensorimotor integration. For robotic hands, even though acquiring such tactile and kinesthetic feedback is feasible, establishing a direct mapping from this sensory feedback to motor actions remains challenging. In this paper, we propose a novel glove-mediated tactile-kinematic perception-prediction framework for grasp skill transfer from human intuitive and natural operation to robotic execution based on imitation learning, and its effectiveness is validated through generalized grasping tasks, including those involving deformable objects. Firstly, we integrate a data glove to capture tactile and kinesthetic data at the joint level. The glove is adaptable for both human and robotic hands, allowing data collection from natural human hand demonstrations across different scenarios. It ensures consistency in the raw data format, enabling evaluation of grasping for both human and robotic hands. Secondly, we establish a unified representation of multi-modal inputs based on graph structures with polar coordinates. We explicitly integrate the morphological differences into the designed representation, enhancing the compatibility across different demonstrators and robotic hands. Furthermore, we introduce the Tactile-Kinesthetic Spatio-Temporal Graph Networks (TK-STGN), which leverage multidimensional subgraph convolutions and attention-based LSTM layers to extract spatio-temporal features from graph inputs to predict node-based states for each hand joint. These predictions are then mapped to final commands through a force-position hybrid mapping.
Enhancing Traffic Signal Control through Model-based Reinforcement Learning and Policy Reuse
Mar 11, 2025



Multi-agent reinforcement learning (MARL) has shown significant potential in traffic signal control (TSC). However, current MARL-based methods often suffer from insufficient generalization due to the fixed traffic patterns and road network conditions used during training. This limitation results in poor adaptability to new traffic scenarios, leading to high retraining costs and complex deployment. To address this challenge, we propose two algorithms: PLight and PRLight. PLight employs a model-based reinforcement learning approach, pretraining control policies and environment models using predefined source-domain traffic scenarios. The environment model predicts the state transitions, which facilitates the comparison of environmental features. PRLight further enhances adaptability by adaptively selecting pre-trained PLight agents based on the similarity between the source and target domains to accelerate the learning process in the target domain. We evaluated the algorithms through two transfer settings: (1) adaptability to different traffic scenarios within the same road network, and (2) generalization across different road networks. The results show that PRLight significantly reduces the adaptation time compared to learning from scratch in new TSC scenarios, achieving optimal performance using similarities between available and target scenarios.
Using a single actor to output personalized policy for different intersections
Mar 10, 2025



Recently, with the development of Multi-agent reinforcement learning (MARL), adaptive traffic signal control (ATSC) has achieved satisfactory results. In traffic scenarios with multiple intersections, MARL treats each intersection as an agent and optimizes traffic signal control strategies through learning and real-time decision-making. Considering that observation distributions of intersections might be different in real-world scenarios, shared parameter methods might lack diversity and thus lead to high generalization requirements in the shared-policy network. A typical solution is to increase the size of network parameters. However, simply increasing the scale of the network does not necessarily improve policy generalization, which is validated in our experiments. Accordingly, an approach that considers both the personalization of intersections and the efficiency of parameter sharing is required. To this end, we propose Hyper-Action Multi-Head Proximal Policy Optimization (HAMH-PPO), a Centralized Training with Decentralized Execution (CTDE) MARL method that utilizes a shared PPO policy network to deliver personalized policies for intersections with non-iid observation distributions. The centralized critic in HAMH-PPO uses graph attention units to calculate the graph representations of all intersections and outputs a set of value estimates with multiple output heads for each intersection. The decentralized execution actor takes the local observation history as input and output distributions of action as well as a so-called hyper-action to balance the multiple values estimated from the centralized critic to further guide the updating of TSC policies. The combination of hyper-action and multi-head values enables multiple agents to share a single actor-critic while achieving personalized policies.
Investigating the Impact of Data Selection Strategies on Language Model Performance
Jan 07, 2025Data selection is critical for enhancing the performance of language models, particularly when aligning training datasets with a desired target distribution. This study explores the effects of different data selection methods and feature types on model performance. We evaluate whether selecting data subsets can influence downstream tasks, whether n-gram features improve alignment with target distributions, and whether embedding-based neural features provide complementary benefits. Through comparative experiments using baseline random selection methods and distribution aligned approaches, we provide insights into the interplay between data selection strategies and model training efficacy. All code for this study can be found on \href{https://github.com/jgu13/HIR-Hybrid-Importance-Resampling-for-Language-Models}{github repository}.