 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCapability Iteration Network for Robot Path Planning
Apr 29, 2021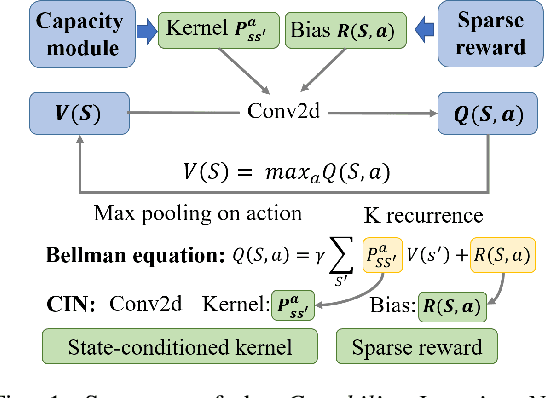
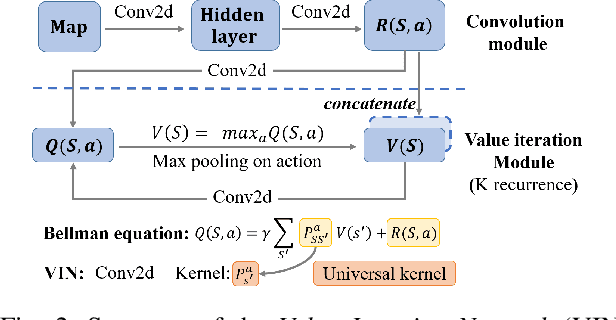
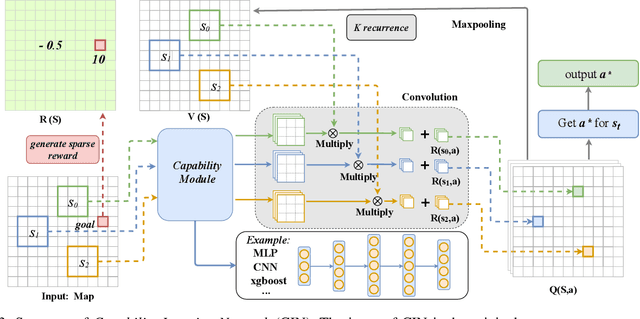
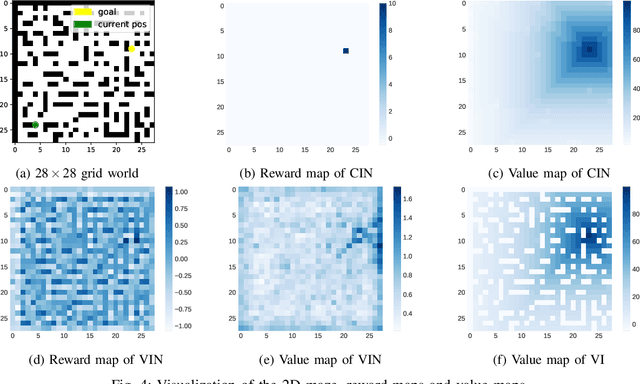
Path planning is an important topic in robotics. Recently, value iteration based deep learning models have achieved good performance such as Value Iteration Network(VIN). However, previous methods suffer from slow convergence and low accuracy on large maps, hence restricted in path planning for agents with complex kinematics such as legged robots. Therefore, we propose a new value iteration based path planning method called Capability Iteration Network(CIN). CIN utilizes sparse reward maps and encodes the capability of the agent with state-action transition probability, rather than a convolution kernel in previous models. Furthermore, two training methods including end-to-end training and training capability module alone are proposed, both of which speed up convergence greatly. Several path planning experiments in various scenarios, including on 2D, 3D grid world and real robots with different map sizes are conducted. The results demonstrate that CIN has higher accuracy, faster convergence, and lower sensitivity to random seed compared to previous VI-based models, hence more applicable for real robot path planning.